КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ И РЕШЕНИЕ НЕЛИНЕЙНЫХ УРАВНЕНИЙ
Создайте Ваш сайт учителя Видеоуроки Олимпиады Вебинары для учителей
Компьютерное моделирование и решение нелинейных уравнений
Вы уже знаете о суперспособностях современного учителя?

Тратить минимум сил на подготовку и проведение уроков.

Быстро и объективно проверять знания учащихся.

Сделать изучение нового материала максимально понятным.

Избавить себя от подбора заданий и их проверки после уроков.

Наладить дисциплину на своих уроках.

Получить возможность работать творчески.
Просмотр содержимого документа
«Компьютерное моделирование и решение нелинейных уравнений»
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ
ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«МОРДОВСКИЙ ГОСУДАРСТВЕННЫЙ
ПЕДАГОГИЧЕСКИЙ ИНСТИТУТ ИМЕНИ М.Е. ЕВСЕВЬЕВА»
Физико-математический факультет
Кафедра информатики и вычислительной техники
РЕФЕРАТ
КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ И РЕШЕНИЕ НЕЛИНЕЙНЫХ УРАВНЕНИЙ
Автор работы _____________________________________А.О. Панишева
Направление подготовки 44.03.05 Педагогическое образование
Профиль Информатика. Математика
Руководитель работы___________________________ Кормилицына Т. В.
Оценка__________________
Саранск 2020
Динамические системы и построение математической модели
Динамические системы – это системы, в которых входные переменные являются функциями от времени или каких-либо других параметров. Описываются эти системы дифференциальными и интегральными уравнениями. Например, большая часть законов механики, электротехники, теории упругости, теории управления и т.д. описываются с помощью дифференциальных уравнений.
На практике динамические системы встречаются очень часто. Моделирование систем, связанных с движением тел, с расчетом потоков энергии, с расчетом потоков материальных ресурсов, с расчетом оборотов денежных средств и т.д. в конечном счете, сводится к построению и решению дифференциальных уравнений (как правило, II-го порядка).
Прямолинейное движение тела, движущегося под действием переменной силы ![]() ,где S=S(t), описывается дифференциальным уравнением второго порядка в форме уравнения Ньютона:
,где S=S(t), описывается дифференциальным уравнением второго порядка в форме уравнения Ньютона:
![]() , где
, где
m - масса тела,
S - перемещение тела,
![]() -линейная скорость,
-линейная скорость,
![]() -линейное ускорение.
-линейное ускорение.
При этом задаваемые начальные условия ![]() ,
, ![]() имеют четкий физический смысл. Это - начальное положение тела и его начальная скорость.
имеют четкий физический смысл. Это - начальное положение тела и его начальная скорость.
Вращательное движение тела под действием крутящего момента ![]() , где
, где ![]() , описывается аналогично
, описывается аналогично ![]() где
где
Iр - полярный момент инерции тела,
![]() -угол поворота,
-угол поворота,
![]() - угловая скорость,
- угловая скорость,
![]() - угловое ускорение.
- угловое ускорение.
При построении математических моделей систем, машин, механизмов с учетом колебаний, возникающих в них, также необходимо построить и решить дифференциальное уравнение, т.к. все виды колебаний (свободные гармонические, вынужденные) также описываются дифференциальными уравнениями.
На практике лишь небольшое число дифференциальных уравнений допускает интегрирование в квадратурах. Еще реже удается получить решение в элементарных функциях. Поэтому большое распространение при решении математических моделей с помощью ЭВМ получили численные методы решения дифференциальных уравнений.
Нахождение определенного интеграла в процессе моделирования объектов процессов или систем может применяться в следующих задачах:
Определение пути при переменной скорости:
Нахождение скорости при переменном ускорении:
Определение моментов инерции тел:
Нахождение работы переменной силы:
При решении дифференциальных уравнений.
Итак, дана функция y=f(x).
Найти интеграл этой функции на участке [a,b], т.е. найти
Если подынтегральная функция f(x) задана в аналитическом виде;
Если функция f(x) непрерывна на отрезке [a,b] ;
если известна ее первообразная, т.е.
![]()
То интеграл может быть вычислен по формуле Ньютона-Лейбница как приращение первообразной на участке [a,b], т.е.
Но на практике формула Ньютона-Лейбница для вычисления интеграла используется редко. Численные методы интегрирования применяются в следующих случаях:
подынтегральная функция f(x) задана таблично на участке [a,b] ;
подынтегральная функция f(x) задана аналитически, но ее первообразная не выражается через элементарные функции;
подынтегральная функция f(x) задана аналитически, имеет первообразную, но ее определение слишком сложно.
В численных методах интегрирования не используется нахождение первообразной. Основу алгоритма численных методов интегрирования составляет геометрический смысл определенного интеграла. Интеграл численно равен площади S криволинейной трапеции, расположенной под подынтегральной кривой f(x) на участке [a,b] (рис.1).
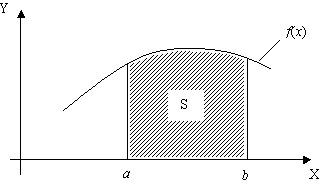
Рисунок 1 – Геометрический смысл определенного интеграла
Суть всех численных методов интегрирования состоит в приближенном вычислении указанной площади. Поэтому все численные методы являются приближенными.
При вычислении интеграла подынтегральная функция f(x) аппроксимируется интерполяционным многочленом. На практике чтобы не иметь дело с многочленами высоких степеней, весь участок [a,b] делят на части и интерполяционные многочлены строят для каждой части деления.
Порядок вычисления интеграла численными методами следующий (рис.2):
Весь участок [a,b] делим на n равных частей с шагом h=(b-a)/n.
В каждой части деления подынтегральную функцию f(x) аппроксимируем интерполяционным многочленом. Степень многочлена n = 0,1,2:
Для каждой части деления определяем площадь частичной криволинейной трапеции.
Суммируем эти площади. Приближенное значение интеграла I равно сумме площадей частичных трапеций
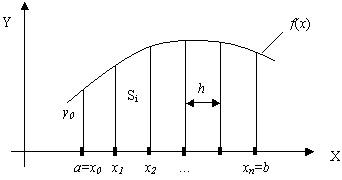
Рисунок 2 – Вычисление определенного интеграла
Нахождение приближенного значения интеграла называется квадратурой, а формулы для приближенного вычисления интеграла - квадратурными формулами или квадратурными суммами.
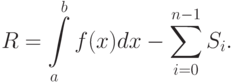
Разность R между точным значением интеграла и приближенным значением называется остаточным членом или погрешностью квадратурной формулы, т.е.
Если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом нулевой степени, т.е. прямой, параллельной оси OX, то квадратурная формула называется формулой прямоугольников, а метод – методом прямоугольников.
Если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом первой степени, т.е. прямой, соединяющей две соседние узловые точки, то квадратурная формула называется формулой трапеций, а метод – методом трапеций.
Если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом второй степени, то квадратурная формула называется формулой Симпсона, а метод – методом Симпсона.
2. Метод прямоугольников
Словесный алгоритм метода прямоугольников:
Весь участок [a,b] делим на n равных частей с шагом h=(b-a)/n.
Определяем значение yi подынтегральной функции f(x) в каждой части деления, т.е.
![]()
В каждой части деления подынтегральную функцию f(x) аппроксимируем интерполяционным многочленом степени n = 0, т.е. прямой, параллельной оси OX. В результате вся подынтегральная функция на участке [a,b] аппроксимируется ломаной линией.
Для каждой части деления определяем площадь Si частичного прямоугольника.
Суммируем эти площади. Приближенное значение интеграла I равно сумме площадей частичных прямоугольников.
Если высота каждого частичного прямоугольника равна значению подынтегральной функции в левых концах каждого шага, то метод называется методом левых прямоугольников (рис.3). Тогда квадратурная формула имеет вид
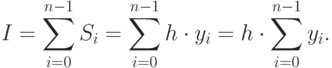
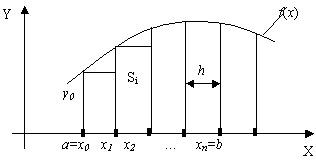
Рисунок 3 – Метод левых прямоугольников
Если высота каждого частичного прямоугольника равна значению подынтегральной функции в правых концах каждого шага, то метод называется методом правых прямоугольников (рис.4). Тогда квадратурная формула имеет вид

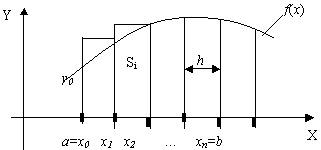
Рисунок 4 – Метод правых прямоугольников
Точность каждого метода прямоугольников имеет порядок h.
Алгоритм вычисления интеграла построим в виде итерационного процесса поиска с автоматическим выбором шага. На каждом шаге будем уменьшать шаг в два раза, то есть увеличивать число шагов n в два раза. Выход из процесса поиска организуем по точности вычисления интеграла. Начальное число шагов n=2. Схема алгоритма методов прямоугольников представлена на (рис. 5).
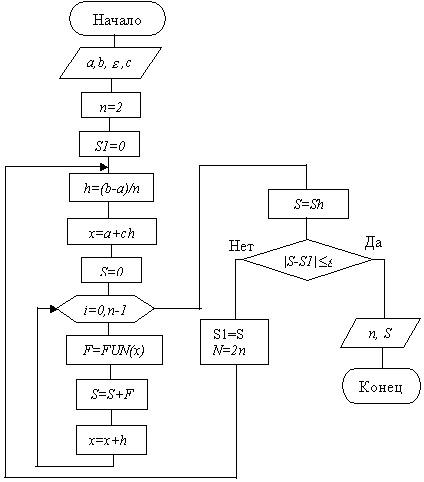
Рисунок 5 – Схема алгоритма метода прямоугольников (с автоматическим выбором шага)
Условные обозначения:
a,b – концы интервала,
![]() – аданная точность,
– аданная точность,
с=0 – метод левых прямоугольников,
с=1 – метод правых прямоугольников,
S1 – значение интеграла на предыдущем шаге,
S – значение интеграла на текущем шаге.
- Метод трапеций
Словесный алгоритм метода трапеций:
Интервал [a,b] делим на n равных частей с шагом h=(b-a)/n.
Вычисляем значение подынтегральной функции в каждой узловой точке
![]()
На каждом шаге подынтегральную функцию f(x) аппроксимируем прямой, соединяющей две соседние узловые точки. В результате вся подынтегральная функция на участке [a,b] заменяется ломаной линией проходящей через все узловые точки.
Вычисляем площадь каждой частичной трапеции.
Приближенное значение интеграла равно сумме площадей частичных трапеций, т.е.
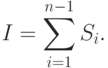
Найдем площади Si частичных трапеций:
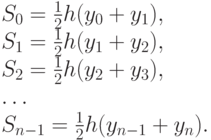
Приближенное значение интеграла равно

Точность метода трапеций имеет порядок h2.
Схема алгоритма метода трапеций представлена на рисунке 6
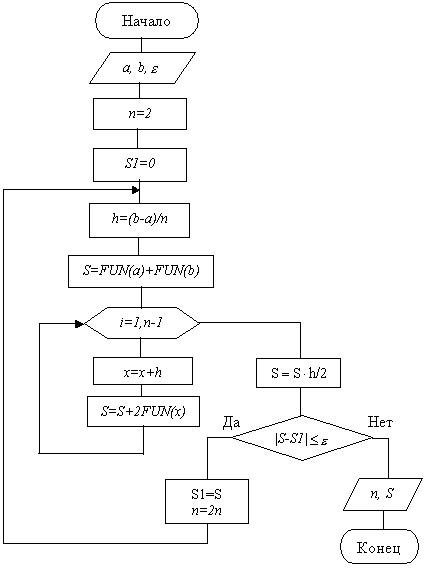
Рисунок 6 – Схема алгоритма метода трапеций (с автоматическим выбором шага)
Метод Симпсона
В методе Симпсона в каждой части деления подынтегральная функция аппроксимируется квадратичной параболой a0x2+a1x+a2. В результате вся кривая подынтегральной функции на участке [a,b] заменяется кусочно-непрерывной линией, состоящей из отрезков квадратичных парабол. Приближенное значение интеграла I равно сумме площадей под квадратичными параболами.
Т.к. для построения квадратичной параболы необходимо иметь три точки, то каждая часть деления в методе Симпсона включает два шага, т.е.
Lk=2h.
В результате количество частей деления N2=n/2. Тогда n в методе Симпсона всегда четное число.
Определим площадь S1 на участке [x0, x2]
Исходя из геометрического смысла определенного интеграла, площадь S1 равна определенному интегралу от квадратичной параболы на участке [x0, x2]:

Неизвестные коэффициенты квадратичной параболы а0 , а1, а2 определяем из условия прохождения параболой через три узловых точки с координатами (x0y0), (x1y1), (x2y2).
На основании этого условия строим систему линейных уравнений:
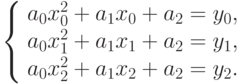
Решая эту систему, найдем коэффициенты параболы.
В результате имеем: ![]() ..
..
Для участка [x2, x4]: ![]() ..
..
:::::::::::::::::::
Для участка [xi-1, xi+1]: ![]() .,
.,
Где ![]() .
.
Суммируя все площади S1 под квадратичными параболами, получим квадратурную формулу по методу Симпсона:

где
N2 - количество частей деления.
Точность метода Симпсона имеет порядок (h3/h4).
Схема алгоритма метода Симпсона:
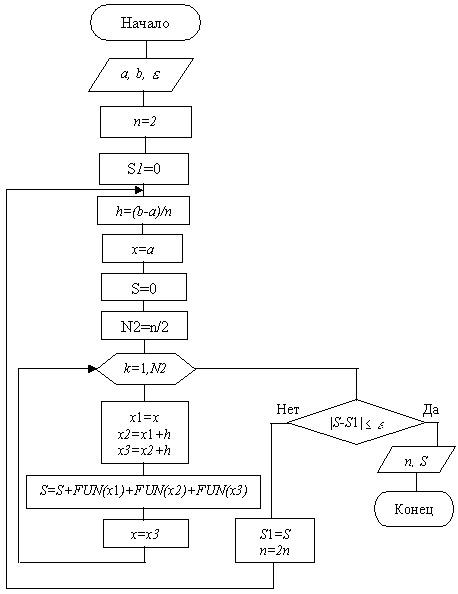
Рисунок 7 – Схема алгоритма Симпсона (с автоматическим выбором шага)
Список используемой литературы
1. Динамические системы. Среда. Методы решения задач. Учебное пособие/ Гуз С.Н., Дегтяр С.Н. – Мозырь: МГПУ, 2002.
2. Демидович Б.П. Сборник задач и упражнений по математическому анализу. - М.: Наука, 1969. – 544 с.
3. Дьяконов В.П. Математические модели и их построение 2000: учебный курс. – СПб.: Питер, 2000.
4. Кирьянов Д.В. Математические модели и их построение. – СПб.: БХВ-Петербург, 2003.
6. Очков В.Ф. Методы решения нелинейных уравнений. - М.: Компьютер пресс, 1998. - 380 с.







Похожие файлы
Полезное для учителя




Распродажа видеоуроков!

1700 руб.
2620 руб.

1900 руб.
2920 руб.

1640 руб.
2530 руб.
1640 руб.
2530 руб.
ПОЛУЧИТЕ СВИДЕТЕЛЬСТВО МГНОВЕННО

* Свидетельство о публикации выдается БЕСПЛАТНО, СРАЗУ же после добавления Вами Вашей работы на сайт
Удобный поиск материалов для учителей
Проверка свидетельства