Демонстрация использования видов АСУ на практике.
Создайте Ваш сайт учителя Видеоуроки Олимпиады Вебинары для учителей
Промышленные роботы
Вы уже знаете о суперспособностях современного учителя?

Тратить минимум сил на подготовку и проведение уроков.

Быстро и объективно проверять знания учащихся.

Сделать изучение нового материала максимально понятным.

Избавить себя от подбора заданий и их проверки после уроков.

Наладить дисциплину на своих уроках.

Получить возможность работать творчески.
Просмотр содержимого документа
«Промышленные роботы»
П РОМЫШЛЕННЫЕ РОБОТЫ
Кузьмицкая Лариса Евгеньевна
Преподаватель информатики
СТЖТСС г. Смоленск

Определение
Законы робототехники
- Робот не может наносить вред жизни и здоровью человека своими действиями.
- Робот обязан подчиняться любым приказам человека, за исключением тех, которые вступали бы в противоречие с первым законом.
- Робот должен защищаться от любой угрозы своему существованию, если такая защита ведется по правилам, не нарушающим второго закона
Автор : Азимов

Структурная схема робота.
Для выполнения своих функций всякий робот должен иметь:
- УУ – устройство управления, для управления составными частями робота.
- ДС - двигательную систему (исполнительный механизм), для передачи управляющих воздействий от ЭВМ к исполнительным органам робота . ИМ робота оснащают различными типами приводов, в основном гидравлическими и пневматическими
- СС – систему связи, для связи робота с оператором и другим технологическим оборудованием.
- ИС – информационную систему, для сбора информации об окружающей среде и состоянии робота.
От оператора технологического оборудования
УУ
ИС
ДС
Окружающая среда

Поколения роботов
- Жестко программируемые роботы
- Программируемые роботы
- Интеллектуальные роботы
Поколения роботов
Жестко программируемые - работают по одной программе, которая закладывается при изготовлении робота и находится в блоке памяти. Роботы первого поколения это простейшие автоматы с программным управлением (в нашей стране их насчитывается более 200 различных моделей). Такие роботы не умеют накапливать и собирать информацию об обрабатываемом объекте. Управляемые роботы требуют непрерывной подачи команд в процессе отработки программы.
Поколения роботов
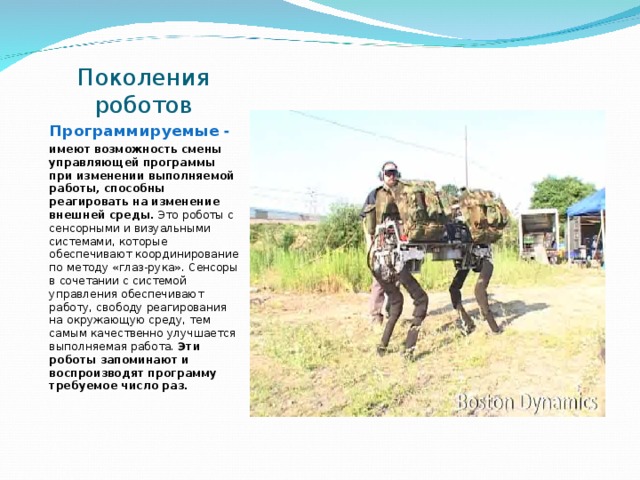
Программируемые -
имеют возможность смены управляющей программы при изменении выполняемой работы, способны реагировать на изменение внешней среды. Это роботы с сенсорными и визуальными системами, которые обеспечивают координирование по методу «глаз-рука». Сенсоры в сочетании с системой управления обеспечивают работу, свободу реагирования на окружающую среду, тем самым качественно улучшается выполняемая работа. Эти роботы запоминают и воспроизводят программу требуемое число раз.

Поколения роботов
Интеллектуальные – это роботы с искусственным интеллектом, позволяют распознавать объекты, их состояние, и на основе этого изменять свои действия. Это роботы с автоматической обработкой информации и возможностью моделировать процессы и рабочие позиции. Состав элементов этих роботов может быть таким же, как и роботов второго поколения, отличие состоит главным образом в более развитом математическом обеспечении. Роботы третьего поколения могут не только обрабатывать, собирать и испытывать отдельные виды изделий, но и управлять производством, включающим несколько групп оборудования. Роботы третьего поколения способны к самообучению, самодиагностике и самовосстановлению
Области применения роботов:
- Перемещение грузов Сварка Сборка Окраска Слежение и управление установками и ходом производства Учет продукции на различных стадиях технологического процесса Выполнение некоторых конструкторских, исследовательских, лабораторных работ.
- Перемещение грузов
- Сварка
- Сборка
- Окраска
- Слежение и управление установками и ходом производства
- Учет продукции на различных стадиях технологического процесса
- Выполнение некоторых конструкторских, исследовательских, лабораторных работ.
Техника безопасности при работе с промышленными роботами
- КАТЕГОРИЧЕСКИ запрещается входить в рабочую зону включенного промышленного робота ; участок с работающими роботами должен быть огражден, а вход на участок посторонним лицам запрещен;
- КАТЕГОРИЧЕСКИ запрещается входить в рабочую зону включенного промышленного робота ; участок с работающими роботами должен быть огражден, а вход на участок посторонним лицам запрещен;
- КАТЕГОРИЧЕСКИ запрещается входить в рабочую зону включенного промышленного робота ; участок с работающими роботами должен быть огражден, а вход на участок посторонним лицам запрещен;
- при первых признаках неполадок и неуправляемости следует немедленно выключить робота нажатием кнопки «аварийный стоп»; при прохождении первого цикла оператор должен находиться у пульта управления роботом и убедиться в правильности выполнения цикла, при замеченных отклонениях в работе робота он должен выяснить причину и устранить ее; на месте установки промышленного робота нужно предусмотреть не менее двух свободных выходов из зоны промышленного робота.
- при первых признаках неполадок и неуправляемости следует немедленно выключить робота нажатием кнопки «аварийный стоп»; при прохождении первого цикла оператор должен находиться у пульта управления роботом и убедиться в правильности выполнения цикла, при замеченных отклонениях в работе робота он должен выяснить причину и устранить ее; на месте установки промышленного робота нужно предусмотреть не менее двух свободных выходов из зоны промышленного робота.
- при первых признаках неполадок и неуправляемости следует немедленно выключить робота нажатием кнопки «аварийный стоп»;
- при прохождении первого цикла оператор должен находиться у пульта управления роботом и убедиться в правильности выполнения цикла, при замеченных отклонениях в работе робота он должен выяснить причину и устранить ее;
- на месте установки промышленного робота нужно предусмотреть не менее двух свободных выходов из зоны промышленного робота.
Контрольные вопросы для проверки знаний Тема: «Робототехника. Промышленные работы»
- Дайте определение робота.
- Назовите три правила (закона) робототехники.
- Какие элементы входят в структурную схему робота.
- Сколько поколений роботов вы знаете.
- Перечислите поколения роботов.
- Опишите первое поколение роботов.
- Опишите второе поколение роботов.
- Опишите третье поколение роботов.
- Перечислите области применения роботов
- Ответьте на вопросы, просмотрев фрагмент фильма
- Используемые материалы:
- 1.Видеоматерал учебного пособия «Основы робототехники» 2-е издание БХВ-Петербург.
- 2. http://www/bhv.ru
- 3. Видеофрагмент 1-го канала телевидения «Настроение»







Полезное для учителя




Распродажа видеоуроков!

1730 руб.
2660 руб.

1770 руб.
2720 руб.

1770 руб.
2720 руб.

1760 руб.
2710 руб.
ПОЛУЧИТЕ СВИДЕТЕЛЬСТВО МГНОВЕННО

* Свидетельство о публикации выдается БЕСПЛАТНО, СРАЗУ же после добавления Вами Вашей работы на сайт
Удобный поиск материалов для учителей
Проверка свидетельства