Научно-технический проект: «Робот «Сопер» на основе Arduino».
Научно-технический проект: «Робот «Сопер» на основе Arduino».
Научно-технический проект: «Робот «Сопер» на основе Arduino».
Актуальность в том, что в настоящее время практически все развитые страны прошли этап формирования технико-экономических и социальных концепций в отношении к робототехнике и энергично включились в процесс внедрения роботов в различные сферы деятельности, и прежде всего в промышленное производство, создания на базе роботов гибких производственных систем.
Вы уже знаете о суперспособностях современного учителя?
Тратить минимум сил на подготовку и проведение уроков.
Быстро и объективно проверять знания учащихся.
Сделать изучение нового материала максимально понятным.
Избавить себя от подбора заданий и их проверки после уроков.
Просмотр содержимого документа
«Научно-технический проект: «Робот «Сопер» на основе Arduino».»
ВВЕДЕНИЕ
В настоящее время, несмотря на повышение компьютеризации общества, в сфере промышленной автоматизации не достаточно средств, позволяющих в достаточной мере автоматизировать процесс.
Целью промышленной автоматизации является уменьшение доли человеческого труда в выполнении технологических процессов. Для этого применяются различные механические и электрические, устройства, предназначенные для выполнения определенных задач, из которых состоит технологический процесс.
В частности, в очень большом количестве технологических процессов в металлургии, машиностроении или приборостроении, в погрузочно-разгрузочных процессах, одной из основных составляющих технологического процесса является перемещение и манипулирование деталями, узлами и прочими составляющими конечных конструкций. Также манипуляторы используются в технологических процессах, где работа проходит в опасных для человека условиях или враждебных средах – например, в ядерной энергетике, горнодобывающей промышленности, химической промышленности. Для автоматизации этого вида задач применяются манипуляторы.
Тема научно-технического проекта: «Робот «Сопер» на основе Arduino».
Актуальность в том, что в настоящее время практически все развитые страны прошли этап формирования технико-экономических и социальных концепций в отношении к робототехнике и энергично включились в процесс внедрения роботов в различные сферы деятельности, и прежде всего в промышленное производство, создания на базе роботов гибких производственных систем.
Объект исследования микроконтроллерное управление электроприводами манипулятора.
Предмет исследования: робототехника.
Цель научно-практического проекта является разработка и реализация бюджетной мобильной платформы с возможностью управления по радиоканалу, а также возможностью получение видеоинформации.
Задачи научно-практического проекта:
выбрать необходимое оборудование для реализации проекта;
произвести анализ приложении наиболее подходящих управления платформой;
реализовать проект;
провести тестирование, отладку и внедрение данного проекта.
Гипотеза: использование современных инноваций в области робототехники. Проект робот «Сопер» позволит повысить эффективность работы.
Методы исследования:
теоретический – анализ изучение мобильных роботов, принципы построения мобильных роботов и т.д.;
описательный;
практический –программное обеспечение Arduino IDE, а также был собран макет манипулятора.
1 ТЕОРЕТИЧЕСКАЯ ЧАСТЬ ПРОЕКТА
1.1 Общие сведения о промышленных роботах и манипуляторах
Стремление освободить человека от непосредственного участия в производственных процессах привело к созданию манипуляторов и роботов. Роботы появились в научно-фантастичной литературе, но развитие науки и техники привело к их практическому созданию и внедрению. Сначала были созданы так называемые роботы-манипуляторы, предназначенные в основном для высвобождения человека от простых, однообразно повторяющихся движений, которые легко поддаются автоматизации. Затем началось внедрение роботов для работы во вредной для здоровья людей среде, а также для замены человека при выполнении тяжелого физического труда.
Манипулятор — это управляемое устройство или машина, снабженная рабочим органом для выполнения двигательных функций, аналогичных функциям человеческой руки при выполнении различных видов операций.
Манипулятором управляет непосредственно рука человека-оператора дистанционно или с помощью программы, которую нельзя изменять. Прототипы таких устройств были созданы еще в древности, но их производство для промышленных целей началось совсем недавно.
Промышленный робот представляет собой стационарный или передвижной программируемый манипулятор промышленного назначения, способный выполнять комплекс изменяющихся движений, предусмотренных в его программе.
Промышленный робот отличается от манипулятора универсальностью воспроизводимых движений и возможностью перенастройки. Внедрение роботов в промышленности началась в конце 60-х годов нашего столетия. Сначала они были предназначены для выполнения несложных операций, таких, как точечная, дуговая сварка, окраска, сортировка изделий и др. Однако с развитием и усовершенствованием их конструкций и систем управления на них стали возлагать все более сложные монтажные, контрольно-измерительные и другие операции.
Типы роботов многообразны, поэтому их классифицируют по различным признакам.
Развитие робототехники идет в трех направлениях: создание программируемых роботов, адаптивных (с самоприспосабливающимися системами) и с искусственным интеллектом.
В программируемых роботах замена программы производится человеком-оператором, после чего робот однообразно повторяет твердо заданную программу.
В адаптивных роботах программа задается также человеком, но робот в ходе технологического процесса в зависимости от обстановки может в определенных пределах самостоятельно изменять программу (адаптироваться). Такие роботы снабжены сенсорными устройствами, которые выполняют роль органов осязания. С их помощью они распознают детали, инструменты, их расположение в пространстве и др. Ими управляют с помощью электронно-вычислительных машин, их память создана на базе интегральных микросхем.
Бурное развитие микропроцессорной и вычислительной техники позволило создать роботы третьего поколения с элементами искусственного интеллекта. В них программу в общем виде вводит человек, а робот обладает способностью «обдумывать», принимать решения и выполнять действия в неопределенной и меняющейся обстановке. Кроме сенсорных устройств в них имеются и элементы искусственного интеллекта. По внешним признакам они действуют аналогично человеку, обдумывающему и принимающему целесообразные решения (как поступить и какие движения совершить) в неизвестной заранее и постоянно меняющейся обстановке.
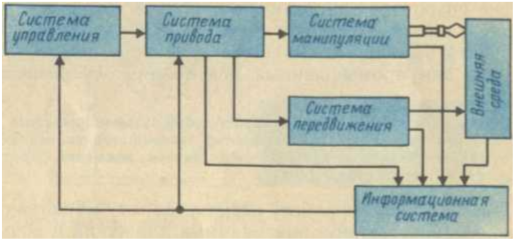
Роботы изготовляют на основе нескольких систем, связанных между собой (рисунок 1.1).
Рисунок 1.1 – Структурная схема промышленного робота
Система манипуляции (СМ) представляет собой механическое устройство (механическую руку-манипулятор) с несколькими степенями свободы. На конце системы имеется захват, вид которого зависит от выполняемых технологических операций (перенос деталей, окраска и др.). Система передвижения (СП) предназначена для передвижения робота в рабочей зоне. Устройство передвижения может быть колесным, шагающим, гусеничным или другого типа. Система привода (СПр) служит для привода отдельных звеньев СМ и СП в соответствии с управляющими сигналами системы управления. Информационная система (ИС) —система сенсорных и других устройств восприятия, измерения и обработки данных о положении рабочих органов в рабочем пространстве, о передвижении робота и о состоянии окружающей среды.
Информация передается системам управления и привода. Система управления (СУ) формирует управляющие воздействия для системы привода в соответствии с заложенной программой и с данными, получаемыми от информационной системы.
Развитие робототехники определяется главным образом развитием систем информации и управления: в каждом последующем поколении роботов они становятся сложнее, но за счет этого расширяются их возможности выполнять все более сложные задачи.
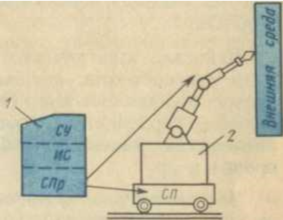
Системы манипуляции и привода образуют исполнительную часть робота (ИЧ), являясь объектом управления. Совокупность остальных систем составляет управляющее устройство робота (УУ). На рисунке 1.2 показана общая функциональная схема промышленного робота [1].
В промышленных роботах используют в основном три вида приводов: пневматический, гидравлический и электромеханический. Пневматический привод состоит из пневмоцилиндров с возвратнопоступательным движением поршневого стержня. Роботы, созданные на его основе, просты по конструкции, но обладают небольшой мощностью.
Гидравлические приводы работают по тому же принципу, что и пневматические, но в качестве рабочего тела в них использовано масло. Такие приводы имеют хорошие механические параметры. Их применяют для роботов большей мощности и для выполнения более сложных технологических операций, требующих высокой точности; их обслуживание сложнее: необходимо следить за уплотнением гидравлической системы.
Рисунок 1.2 – Функциональная схема промышленного робота
Электромеханические приводы выполняют на основе двигателей постоянного тока, шаговых синхронных двигателей. В их конструкциях не требуются трубопроводы. Их основной недостаток — необходимость создания дополнительной передачи для регулирования оборотов двигателя.
В последующие годы применение промышленных роботов будет расширяться. Постепенно они смогут взять на себя значительную часть функций человека на производстве.
1.2 Характеристики манипуляторов
Для чего бы ни был предназначен манипулятор, его пригодность для совершения какой-либо функции определяет ряд характеристик, зависящих от его строения. Основными характеристиками манипуляторов являются в основном механические характеристики: степень свободы, степень подвижности, грузоподъемность, кинематика.
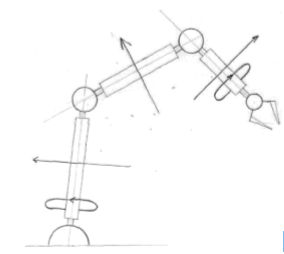
Параметры каждого из них варьируются в зависимости от того, какое предназначение имеет робот, потому что в каждой сфере использования важна отдельная характеристика. Одной из них является степень свободы манипулятора. Она представляет собой возможность манипулятора изменять положение. Например, на рисунке 1 мы видим манипулятор, имеющий 5 степеней подвижности. Это значит, что его звенья могут двигаться в 5 разных направлениях: первое и третье (считая от рабочего органа – схвата) имеют 2 степени свободы. Они могут не только двигаться по прямой, но и вращаться вокруг своей оси. Последней способности нет у второго звена, оно может изменять свое положение только вертикально.
Рисунок 1.3 – степени свободы манипулятора
Под степенями подвижности манипулятора (или степенями свободы) понимают обобщенные координаты, определяющие положение в пространстве звеньев манипулятора. Число степеней подвижности, т.е. сумма возможных координатных движений рабочего органа или объекта манипулирования относительно опорной системы, является одной из важнейших характеристик манипулятора, определяющих форму его рабочей зоны и эффективность маневрирования рабочего органа в этой зоне.
Рассмотренный манипулятор, структурная схема которого представлена на рисунке 1.3, имеет пять подвижных звеньев (1, 2, 3, 4) и пять кинематических пар пятого класса (0, 1, 2, 3, 4, - на рисунке в кружочках), следовательно, число его степеней подвижности по полной формуле Сомова-Малышева .
Степени подвижности манипулятора в зависимости от назначения и характера движений разделяют на переносные, ориентирующие и координатные. Переносные, или региональные, степени подвижности МС обеспечивают перемещение рабочего органа или объекта манипулирования в заданное место рабочей зоны; ориентирующие, или локальные, - их ориентацию; координатные, или глобальные, - перемещение рабочего органа или объекта манипулирования за пределы рабочей зоны перемещением самого робота. Так, для манипулятора, степени подвижности, за счет которых совершаются движения колонны 1, каретки 2 и «руки» 3, относятся к переносным, а степени подвижности, реализуемые при движении звеньев 4 - к ориентирующим. Если основание 0 этого манипулятора выполнить подвижным, например, в направлении одной или двух горизонтальных осей, то соответственно появится 1 или 2 дополнительные координатные степени подвижности, что значительно расширяет рабочее пространство робота при сохранении размеров звеньев его манипуляционной системы.
Число степеней подвижности манипулятора, т.е. суммарное количество переносных, ориентирующих, и координатных степеней подвижности, позволяет судить о технологических возможностях робота, его универсальности, конструктивной сложности и др. Для обслуживания объемной рабочей зоны манипулятор должен иметь не менее трех степеней подвижности; при двух степенях объемная рабочая зона вырождается в поверхностную (плоскую, цилиндрическую или сферическую), при одной-в линейную (в виде прямой или дуги окружности).
Любой манипулятор должен иметь не менее одной переносной степени подвижности; ориентирующие и координатные степени подвижности могут отсутствовать. Большинство моделей манипуляторов имеют по две-три переносных и по одной-две ориентирующих степеней подвижности. Последние обеспечивают вращательные движения рабочего органа относительно продольной оси «руки» (ротацию) и относительно оси, перпендикулярной к продольной (сгибание).
Увеличение числа степеней подвижности усложняет манипулятор и его управляющую систему, но улучшает технологические возможности робота, его универсальность, повышает маневренность манипулятора.
Степень подвижности манипулятора. Следующая характеристика напоминает первую названием, но отличается от нее смыслом. Любая кинематическая цепь обладает некоторым числом степеней подвижности. Эта характеристика определяет число свободы хвата манипулятора, т.е. сложность устройства рабочего органа. Для исполнения своей прямой обязанности у манипулятора должно быть не менее 6 степеней подвижности, а если их больше 6, то такую систему называют кинематической схемой с избыточностью. Увеличение степени подвижности объясняется специфическими факторами, влияющими на объект манипуляций. Например, роботу придется перемещать объект в ограниченном пространстве или по определенной траектории. Таким образом, число степеней подвижности манипулятора является одной из важнейших его характеристик.
Грузоподъемность также является важной характеристикой манипулятора. Однако, вне зависимости от подвижности манипулятора, каждый из них обладает своей грузоподъемностью, которая не менее, а в некоторых областях более важна при конструкции робота. Грузоподъемность показывает, насколько тяжелым грузом сможет оперировать робот, при этом не подвергая себя и манипулятор каким-либо механическим повреждениям и неполадкам. Этот параметр задается при создании робота и зависит от его размера, строения и предназначения. Для роботов разного назначения грузоподъемность разная, и может варьироваться от грамма до нескольких тонн. Манипуляторы с большой грузоподъемностью отличаются
1.3 Типовыеэлементыманипуляторов
Одним из важных элементов манипулятора является сервопривод. Под сервоприводом чаще всего понимают механизм с электромотором, который можно попросить повернуться в заданный угол и удерживать это положение. Однако, это не совсем полное определение.
Если сказать полнее, сервопривод — это привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервоприводом является любой тип механического привода, имеющий в составе датчик (положения, скорости, усилия и т.п.) и блок управления приводом, автоматически поддерживающий необходимые параметры на датчике и устройстве согласно заданному внешнему значению. Иными словами:
Сервопривод получает на вход значение управляющего параметра. Например, он может получить угол поворота.
Блок управления сравнивает это значение со значением на своём датчике.
На основе результата сравнения привод производит некоторое действие, например: поворот, ускорение или замедление так, чтобы значение с внутреннего датчика стало как можно ближе к значению внешнего управляющего параметра.
Наиболее распространены сервоприводы, которые удерживают заданный угол и сервоприводы, поддерживающие заданную скорость вращения.
Типичный хобби-сервопривод изображён ниже.
Рисунок 1.4 – Пример сервопривода
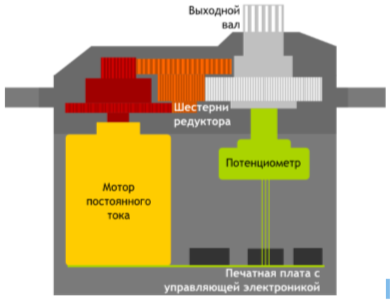
Сервоприводы имеют несколько составных частей. Их общая структура представлена на рисунке
Рисунок 1.5 – Общая структура сервопривода
Привод — электромотор с редуктором. Чтобы преобразовать электричество в механический поворот, необходим электромотор. Однако зачастую скорость вращения мотора бывает слишком большой для практического использования. Для понижения скорости используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, можно вращать выходной вал — конечную шестерню сервопривода, к которой можно прикрепить нечто, чем мы хотим управлять. Однако, для того чтобы положение контролировалось устройством, необходим датчик обратной связи — энкодер, который будет преобразовывать угол поворота обратно в электрический сигнал. Для этого часто используется потенциометр. При повороте бегунка потенциометра происходит изменение его сопротивления, пропорциональное углу поворота. Таким образом, с его помощью можно установить текущее положение механизма.
Кроме электромотора, редуктора и потенциометра в сервоприводе имеется электронная начинка, которая отвечает за приём внешнего параметра, считывание значений с потенциометра, их сравнение и включение/выключение мотора. Она-то и отвечает за поддержание отрицательной обратной связи.
К сервоприводу тянется три провода. Два из них отвечают за питание мотора, третий доставляет управляющий сигнал, который используется для выставления положения устройства.
Управление сервоприводом. Интерфейс управляющих сигналов
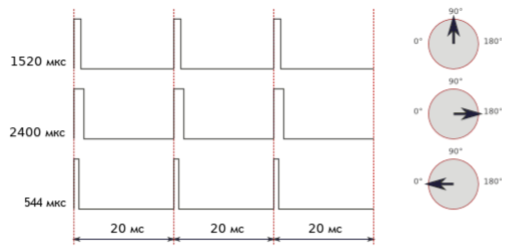
Чтобы указать сервоприводу желаемое положение, по предназначенному для этого проводу необходимо посылать управляющий сигнал. Управляющий сигнал — импульсы постоянной частоты и переменной ширины.
Рисунок 1.6 – Импульсы постоянной частоты и переменной ширины
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал поступает в управляющую схему, имеющийся в ней генератор импульсов производит свой импульс, длительность которого определяется через потенциометр. Другая часть схемы сравнивает длительность двух импульсов. Если длительность разная, включается электромотор. Направление вращения определяется тем, какой из импульсов короче. Если длины импульсов равны, электромотор останавливается. Чаще всего в сервоприводах импульсы производятся с частотой 50 Гц. Это значит, что импульс испускается и принимается раз в 20 мс. Обычно при этом длительность импульса в 1520 мкс означает, что сервопривод должен занять среднее положение. Увеличение или уменьшение длины импульса заставит сервопривод повернуться по часовой или против часовой стрелки соответственно. При этом существуют верхняя и нижняя границы длительности импульса. В библиотеке Servo для Arduino по умолчанию выставлены следующие значения длин импульса: 544 мкс — для 0° и 2400 мкс — для 180°.
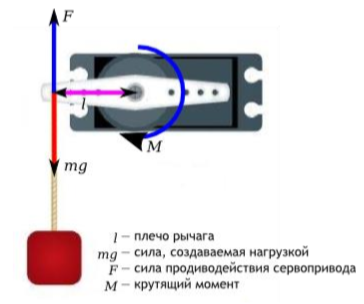
Важнейшими характеристиками сервоприводов: крутящий момент и скорость поворота Сначала поговорим о двух очень важных характеристиках сервопривода: о крутящем моменте и о скорости поворота. Момент силы, или крутящий момент — векторная физическая величина, равная произведению радиус-вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
Рисунок 1.7 – Пример вращательное действие силы на твёрдое тело
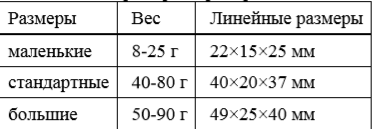
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов. Их можно разделить на:
маленькие;
стандартные;
большие.
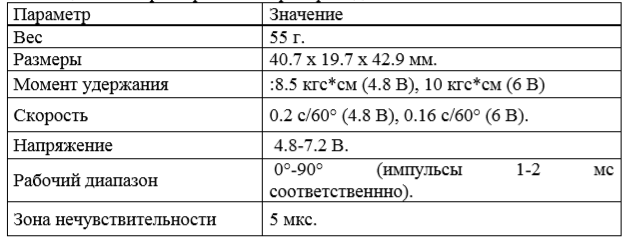
Обладают они при этом характерными габаритами, перечисленными в таблице 1.4.
Таблица 1.4 – Примеры сервоприводов
2 КОНСТРУКТОРСКАЯ ЧАСТЬ
2.1 Выбор микроконтроллеров Arduino
Плата Arduino Mega 2560 На плате предусмотрено всё необходимое для удобной работы с микроконтроллером: 54 цифровых входа/выхода (из которых 15 могут использоваться в качестве ШИМ-выходов), 16 аналоговых входов, 4 UART (аппаратных приемопередатчика для реализации последовательных интерфейсов), кварцевый резонатор на 16 МГц, разъём USB, разъём питания, разъём ICSP для внутрисхемного программирования и кнопка сброса.
Сердцем платформы Arduino Mega 2560 является 8-битный микроконтроллер семейства AVR — ATmega2560. Он предоставляет 256 КБ флеш-памяти для хранения прошивки, 8 КБ оперативной памяти SRAM и 4 КБ энергонезависимой памяти EEPROM для хранения данных.
Микроконтроллер ATmega16U2 обеспечивает связь микроконтроллера ATmega2560 с USB-портом компьютера. При подключении к ПК Arduino Mega 2560 определяется как виртуальный COM-порт. Прошивка микросхемы 16U2 использует стандартные драйвера USB-COM — установка внешних драйверов не требуется. На рисунке 2.1 изображено Arduino Mega 2560
Рисунок 2.1 – Arduino Mega 2560
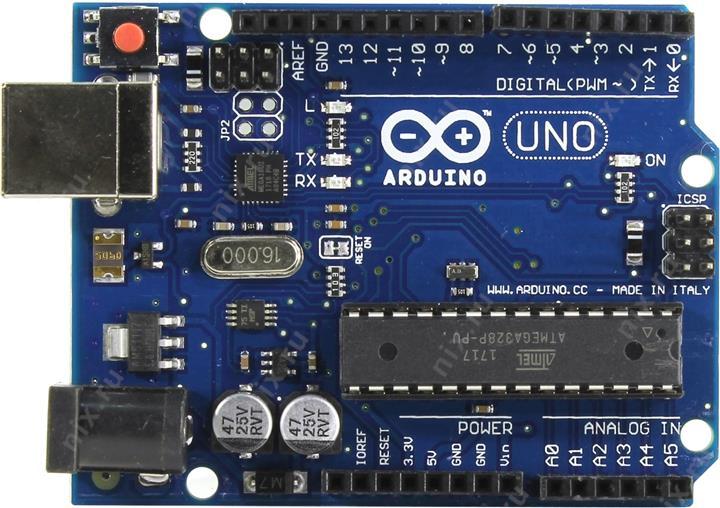
На Arduino Uno предусмотрено всё необходимое для удобной работы с микроконтроллером: 14 цифровых входов/выходов (6 из них могут использоваться в качестве ШИМ-выходов), 6 аналоговых входов, кварцевый резонатор на 16 МГц, разъём USB, разъём питания, разъём для внутрисхемного программирования (ICSP) и кнопка сброса.
Микроконтроллер ATmega16U2 обеспечивает связь микроконтроллера ATmega328P с USB-портом компьютера. При подключении к ПК Arduino Uno определяется как виртуальный COM-порт. Прошивка микросхемы 16U2 использует стандартные драйвера USB-COM, поэтому установка внешних драйверов не требуется. На рисунке 2.2 изображена плата Arduino Uno.
Рисунок 2.2 – Arduino Uno
На Arduino Uno предусмотрено всё необходимое для удобной работы с микроконтроллером: 14 цифровых входов/выходов (6 из них могут использоваться в качестве ШИМ-выходов), 6 аналоговых входов, кварцевый резонатор на 16 МГц, разъём USB, разъём питания, разъём для внутрисхемного программирования (ICSP) и кнопка сброса.
Микроконтроллер ATmega16U2 обеспечивает связь микроконтроллера ATmega328P с USB-портом компьютера. При подключении к ПК Arduino Uno определяется как виртуальный COM-порт. Прошивка микросхемы 16U2 использует стандартные драйвера USB-COM, поэтому установка внешних драйверов не требуется.
Микроконтроллер ATmega168 имеет 16 кБ флеш-памяти для хранения кода программы, а микроконтроллер ATmega328, в свою очередь, имеет 32 кБ (в обоих случаях 2 кБ используется для хранения загрузчика). ATmega168 имеет 1 кБ ОЗУ и 512 байт EEPROM (которая читается и записывается с помощью библиотеки EEPROM), а ATmega328 – 2 кБ ОЗУ и 1 Кб EEPROM.
Рисунок 2.4 – Sensor Shield for Arduino
Плата расширения для подключения дополнительных датчиков к Arduino V5.0 KEYESTUDIO Sensor Shield V5 for Arduino
Коммутационная плата Sensor Shield V5.0 позволяет подключать разные внешние устройства, такие как датчики, реле, серво-машинки, кнопки, потенциометры и т.д.
Представляет собой модуль расширения для использования в сложных проектах. Позволяет упростить соединение Arduino UNO с датчиками, моторами, индикаторами и другими устройствами. Облегчается соединение с аналоговыми входами Arduino UNO, цифровыми входами и выходами и стандартными интерфейсами. Sensor shield v5.0 устанавливается поверх Arduino UNO благодаря имеющимся на нижней стороне платы штырям. Недостаточно соединить сигнальные линии датчика, требуется подключить питание. Для этого модуль содержит специальные контакты, через которые питание разветвляется по всем подключаемым устройствам. Есть возможность подключить отдельный блок питания. Для этого предусмотрено подключение модуля расширения Arduino Sensor Shield 5.0 к питанию через специальную клемму. Также можно использовать питание от линий модуля Arduino UNO. Из активных элементов Arduino Sensor Shield 5.0 содержит светодиоды. В модуле расширения установлена дублирующая кнопка Reset.
Характеристики Напряжение питания 5 В. Размеры 57 х 57 х 20 мм.
2.2 Выбор сервопривода
Сервопривод MG995 изображён на рисунке 2.5, а его характеристики приведены в таблице 2.1.
Рисунок 2.5 – Сервопривод MG995
Таблица 2.1 – Характеристики сервопривода MG995
3 ПРОГРАММНАЯ ЧАСТЬ
3.1 Платформа Arduino IDE
Среда разработки Arduino представляет собой текстовый редактор программного кода, область сообщений, окно вывода текста(консоль), панель инструментов и несколько меню. Для загрузки программ и связи среда разработки подключается к аппаратной части Arduino.
Программа, написанная в среде Arduino, называется скетч. Скетч пишется в текстовом редакторе, имеющем инструменты вырезки/вставки, поиска/замены текста. Во время сохранения и экспорта проекта в области сообщений появляются пояснения, также могут отображаться возникшие ошибки. Окно вывода текста(консоль) показывает сообщения Arduino, включающие полные отчеты об ошибках и другую информацию.
На рисунке 3.1 изображено окно Arduino IDE
Рисунок 3.1 – Программа Arduino IDE
Программная часть состоит из библиотек в свободном доступе, их прошивка и программирования аппаратуры. Аппаратная часть представляет собой набор смонтированных печатных плат, продающихся как официальным производителем, так и сторонними производителями.
Полностью открытая архитектура системы позволяет свободно копировать или дополнять линейку продукции Arduino. Arduino может использоваться как для создания автономных объектов автоматики, так и подключаться к программному обеспечению на компьютере через стандартные проводные и беспроводные интерфейсы.
ЗАКЛЮЧЕНИЕ
В ходе выполнения данного научного проекта была спроектирована и разработана мобильная платформа с возможностью управления по двум каналам связи, это радиоканал и канал Wi-fi с возможностью получения видеоинформации по радиоканалу на 1200 Мг.
Были выполнены следующие задачи:
- выбрать необходимое оборудование для реализации проекта;
- произвести анализ приложении наиболее подходящих управления платформой;
- реализовать проект;
- провести тестирование, отладку и внедрение данного проекта.
В первой главе научного проекта производится анализ мобильных платформ и выбор наиболее подходящей.
Во второй главе научного проекта описывается выбранное оборудование и обоснование выбора. А также произведен анализ мобильных приложений для управления мобильной платформой через телефон, выбрано наиболее удобное и подходящее приложение.
В третьей главе рассмотрены структурное содержание проекта, процесс реализации мобильной платформы, сборка ресурсов мобильной платформы, программирование драйвера двигателей и Wi-fi модуля. Мобильная платформа оттестирована и готово к практическим задачам. Рассмотрены дальнейшие варианты развития и реализации данной мобильной платформы.
Данный проект имеет практическую направленность и значимость в автоматизации промышленного процесса.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
Gurstelle W. - Building Bots. Designing and Building Warrior Robots – 2002, -258 c.
Michael Margolis. Make an Arduino-Controlled Robot, - 2012 - 140 с.
Дж. Вильямс, Программируемые роботы. Создаем робота для своей домашней мастерской, - 2006. - 348 c.
Жимарши Фредерик , Сборка и программирование мобильных роботов в домашних условиях. (Robots mobiles programmables Techniques avancees) . Перевел с французского М.А.Комаров – 2007. - 390 c.
Ньютон С.Брага, Создание роботов в домашних условиях, 2007. - 309с.
Оуэн Бишоп Настольная книга разработчика роботов [2010] - 356 с.
Фредерик Жимарши. Сборка и программирование мобильных роботов в домашних условиях, 2014. – 280 c.
Юревич Е.И. Основы робототехники, - 2005. - 190 c.