Методическая разработка «Мини робот сумоист «МАКС»
Методическая разработка «Мини робот сумоист «МАКС»
Предлагаю для педагогов дополнительного образования робототехнических объединений методическую разработку для учащихся 7 - 11 классов по изготовлению простого мини робота для соревнований по робототехнике в классе «Сумо»
В данной разработке приводится описание изготовление мини робота, В приложении к разработке даны чертежи шасси, регламент проведения соревнований (правила). Принципиальные схемы, монтажные платы и пошаговая инструкция по сборке и настройки всей системы робота.
Вы уже знаете о суперспособностях современного учителя?
Тратить минимум сил на подготовку и проведение уроков.
Быстро и объективно проверять знания учащихся.
Сделать изучение нового материала максимально понятным.
Избавить себя от подбора заданий и их проверки после уроков.
Просмотр содержимого документа
«Методическая разработка «Мини робот сумоист «МАКС»»
Муниципальное бюджетное учреждение
дополнительного образования «Станция юных техников»
города Каменск-Шахтинский
Ростовская область
Мини робот сумоист «МАКС»
Методическая разработка
(Для учащихся 7 -11 класса робототехнических объединений учреждений дополнительного образования)
Автор: Барышев Е. В.
педагог дополнительного образования.
2016 г.
Содержание
Пояснительная записка.
Этапы изготовления узлов и сборка робота.
Электроника, схемы, принцип работы.
Механика, чертежи, инструкция по сборке.
Настройка робота.
Материалы, инструменты и оборудование.
Заключение.
Источники информации.
Приложение к методической разработке.
Пояснительная записка
Данная методическая разработка предназначена для самостоятельного изготовления учащимися 7 – 11 класса мобильного мини робота сумоиста «MAKC» для соревнований Robo Sumo.
Методическая разработка направлена на достижение следующих целей и задач:
Образовательные:
подготовить учащихся к исследовательско - проектной работе;
ознакомить учащихся с регламентом соревнований мобильных мини роботов;
помочь в создании мобильного робота, который мог бы решать ряд задач в области спортивной робототехники.
Развивающие:
развитие интереса и склонностей в области спортивной робототехнике;
развитие навыков при работе с измерительными приборами;
развитие конструкторского и изобретательского мышления.
Воспитывающие:
воспитание всестороннего интереса к технике, творческого отношения к труду, аккуратности при изготовлении моделей;
воспитание чувства взаимоуважения между кружковцами.
Работа рассчитана на учащихся 14 – 18 лет. На изготовление мини робота отведено 32 часа.
Для освоения специальной терминологией и изучения различных моделей поведения и применения ВЕАМ методов в спортивной робототехнике предлагается следующая методика изучения:
самостоятельное изготовление механики робота по чертежам;
самостоятельная сборка и настройка робота по инструкции;
провести испытания робота и проанализировать полученные результаты.
Сохраняя общую направленность материала, определяемую предлагаемой методической разработкой, преподаватель, должен иметь свой авторский демонстрационный материал (наглядное пособие, фото и видео материал соревнований). Учащийся может использовать данную методическую разработку как шаблон, для написания своей научно - исследовательской работы.
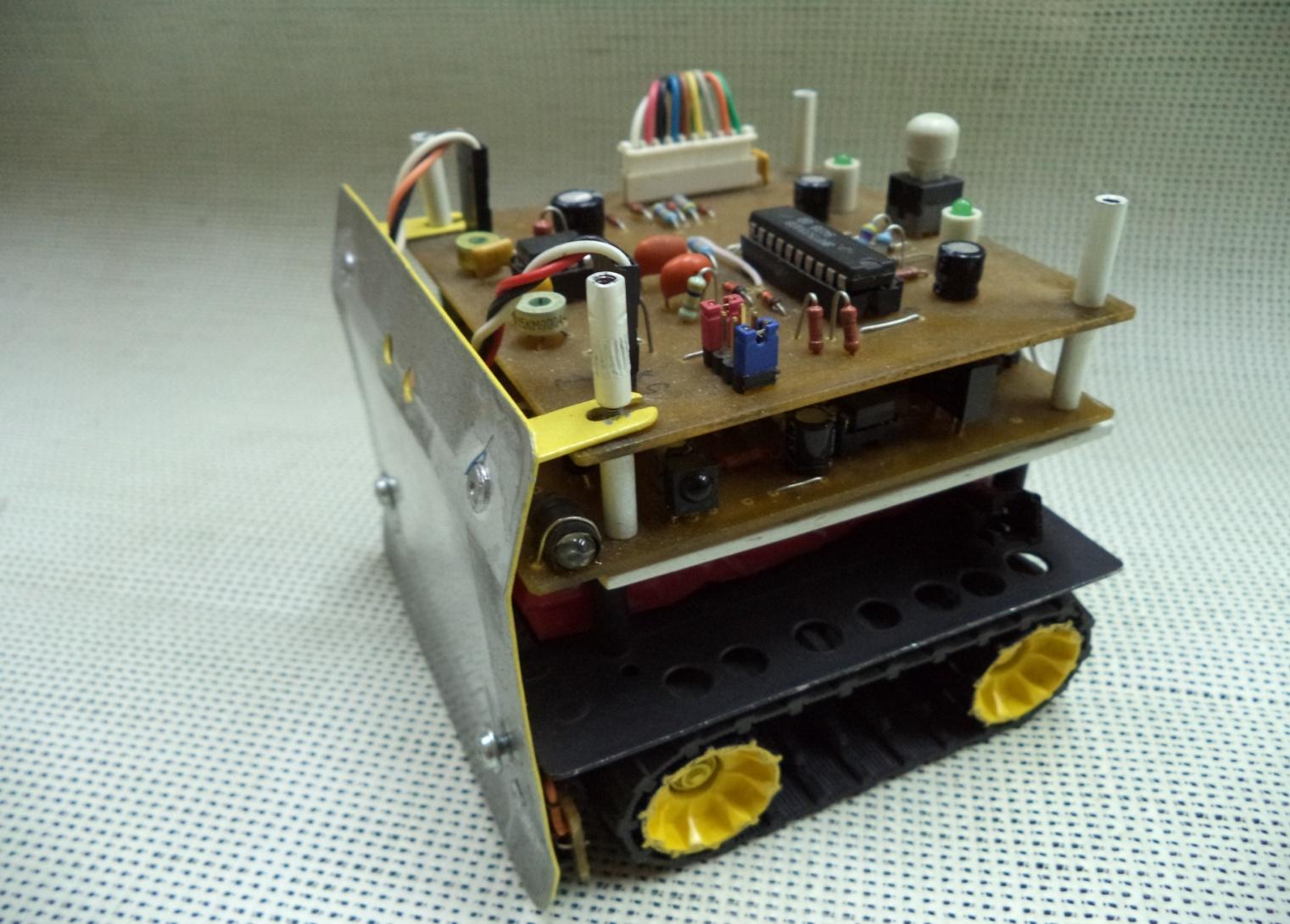
Фотография мини робота сумоиста «Макс»
Этапы изготовления узлов и сборка робота
Данная модель робота соответствует категории «Мини». Размер робота не превышает 10х10х14 см. Вес не более 500 г. Робот полностью автономный, он способен передвигаться по рингу диаметром 77 см, не покидая край ринга – белую линию, находит противника и выталкивает его за пределы ринга. С регламентом Robo Sumo соревнований можно ознакомиться на сайте «http://myrobot.ru/», или в приложении №1.
Мобильный мини робот сумоист «MAKC» состоит из трех плат электроники, шасси на гусеничном ходу и несущей рамы, на которой размещены все платы и шасси.
Электроника, схемы, принцип работы
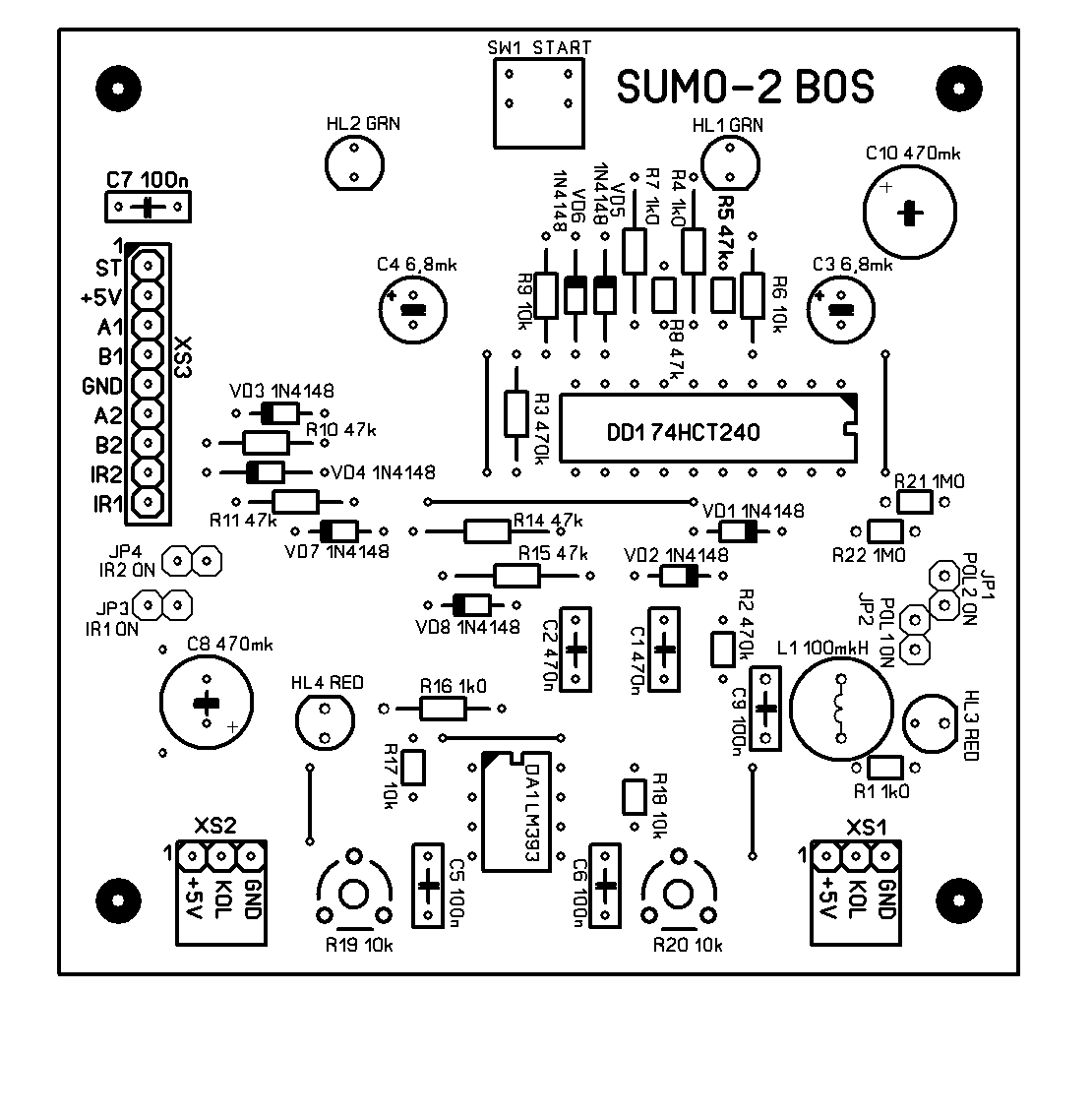
Первая плата - блок обработки сигнала «BOS» На ней располагаются схема контроля границы ринга, построенная на микросхеме DA1. На микросхеме DD1, буферный усилитель без инверсии, построен контроллер обработки информации, поступающих с датчиков.
Датчики границы ринга работают на отражение ИК – света от поверхности ринга и собраны на светодиодах инфракрасного спектра свечения марки АЛ107, фототранзисторах марки РT4800F.
Датчики поиска противника работают на отражение кодированного ИК – света от поверхности робота противника. Построены они на светодиодах инфракрасного излучения и фототранзисторах от шариковой компьютерной мышки.
Вторая плата - драйвер двигателей (DRV), на ней располагаются фототранзисторы марки PT5529В. Схема построена на специализированной микросхеме LM567, в ней находится компаратор сравнения сигнала и генератор импульсов для датчиков.
На этой же плате располагается и схема управление двигателями (драйвер моторов) – которая получает команды на движение и смену направления вращения от первой платы по проводам. Драйвер построен по мостовой схеме на биполярных транзисторах. На микросхеме 74НС14 собран пяти секундный таймер и инвертор сигнала. Стабилизатор 7805 обеспечивает стабильным напряжением все схемы робота. Источником питания является аккумулятор напряжением 7,2 вольта и током 2000 миллиампер в час.
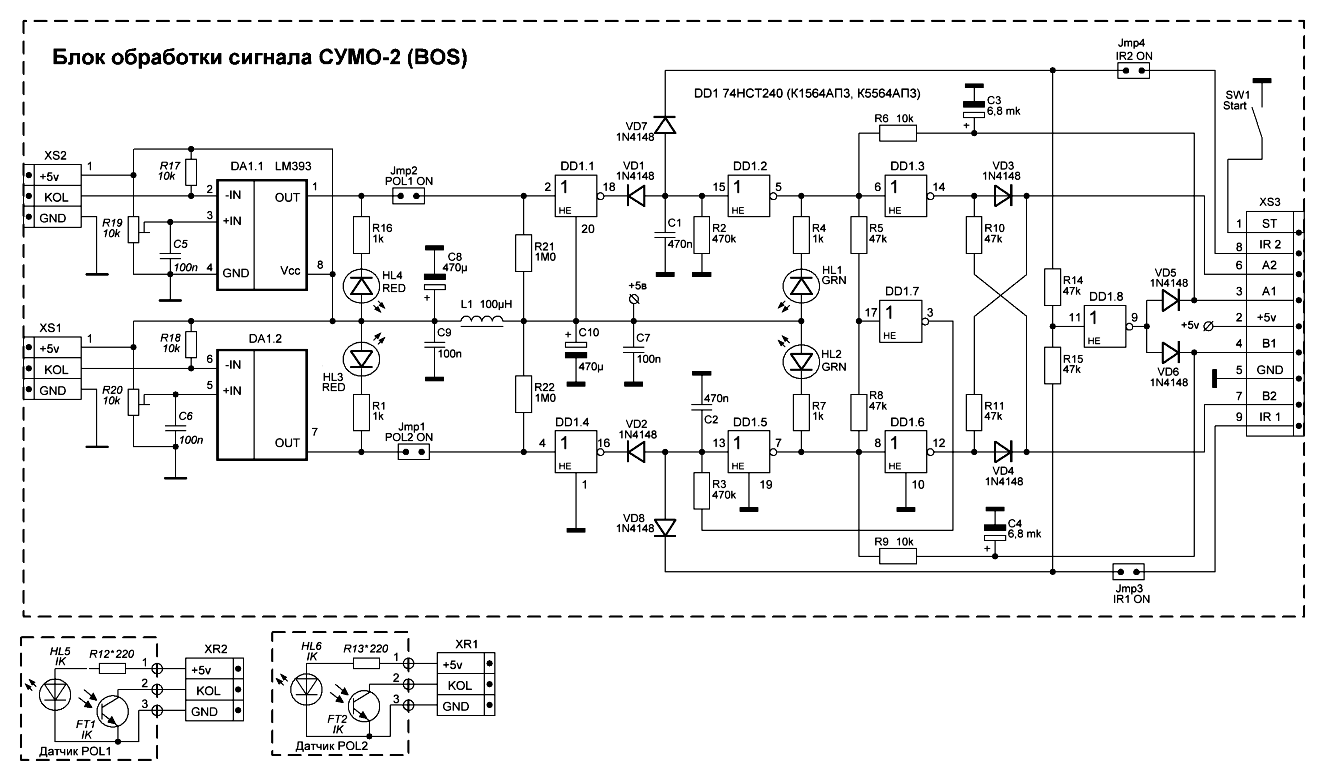
Блок обработки сигнала (BOC).
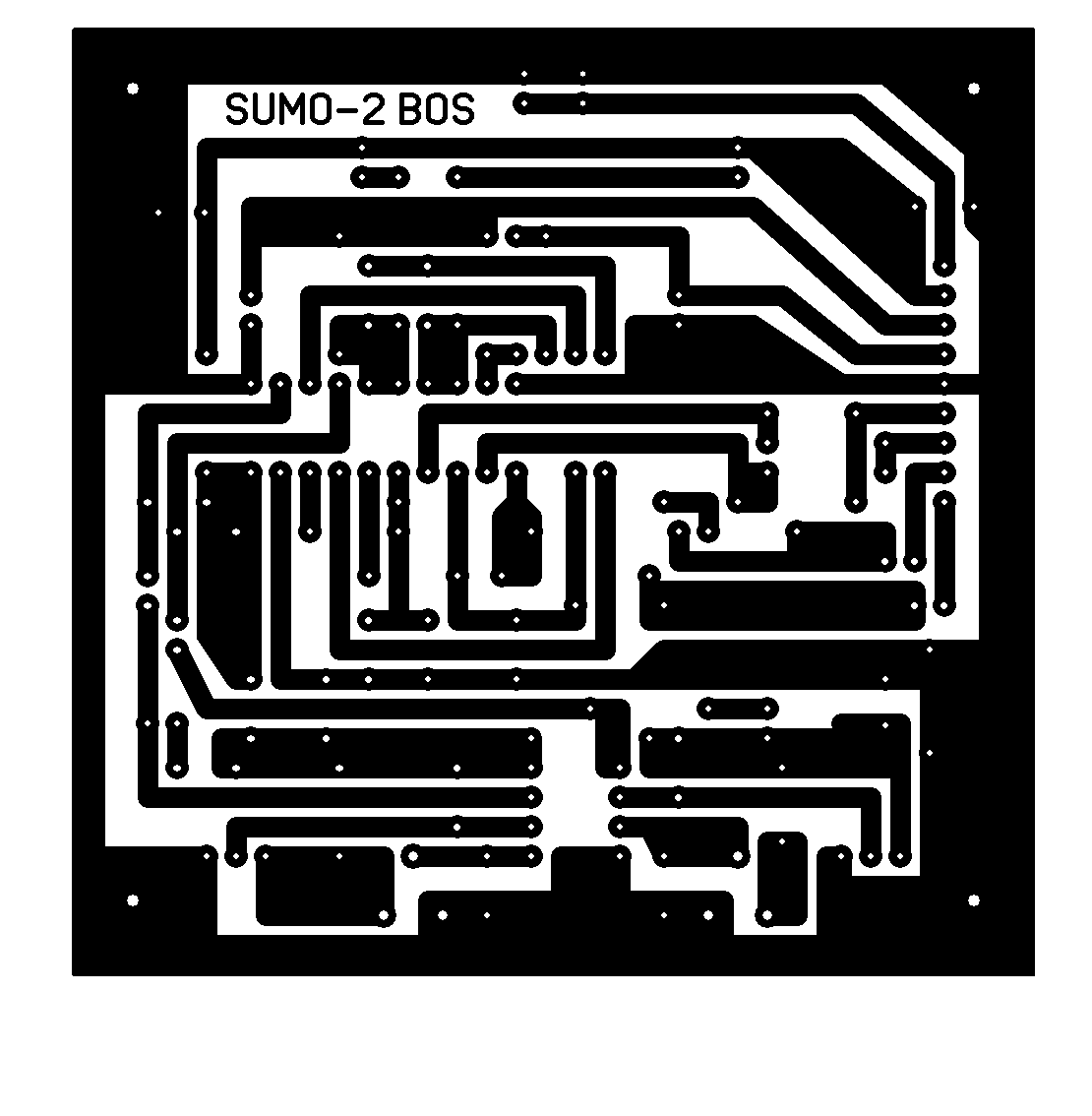
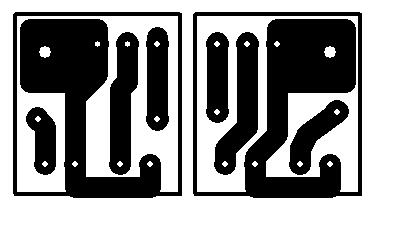
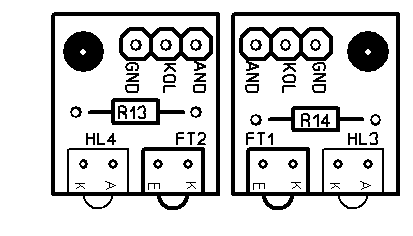
На рисунке 1 показана схема блока обработки сигнала (BOC), а на рисунке 2 монтажная и печатные платы. На элементах DD1.1 и DD1.4 построены согласующие цепи DD1 с DA1. На DD1.2 и DD1.5 выполнены времязадающие цепи. На рисунке 3 монтажные и печатные платы датчиков ринга.
Рисунок 1.
Рисунок 2.
Рисунок 3.
Список радиодеталей блока обработки сигнала.
Позиция
наименование
замена
количество
рисунок
РЕЗИСТОРЫ
R1, R16, R4, R7
1к
820
4 шт
R2, R3
470к
510к
2 шт
R5, R8, R10,R11, R14, R15
47k
43к
6 шт
R12,R13
220
120…240
2 шт
R6,R9, R17, R18
10k
11к
4 шт
R21,R22
1М
510к…820к
2 шт
R19,R20
подстроечный
10k
8,2к
2 шт
ДИОДЫ
VD1, VD2, VD3, VD4, VD5, VD6, VD7, VD8
1N4148
КД522А
8 шт
СВЕТОДИОДЫ
HL1, HL2
зеленый
АЛ307
2 шт
HL3, HL4
красный
АЛ305
2 шт
HL5, HL6
ИК диод
АЛ107
2 шт
КОНДЕНСАТОРЫ
C1, C2
470n
330n
2 шт
C3, C4 электролит
6,8mk 10v
10mk 6,3v
2 шт
C5, C6, C7, C9
100n
220n
4 шт
C8, C10 электролит
470mk 6,3v
680mk 6,3v
2 шт
МИКРОСХЕМЫ
DD1
74HCT240
К5564АП3
1 шт
DA1
LM393
--------
1 шт
ФОТОТРАНЗИСТОР
FT1, FT2
От шариковой мышки
ФТ1к
2 шт
ДРОССЕЛЬ
L1
100mH
100mH
1 шт
РАЗЪЕМЫ И ПРОЧАЯ АРМАТУРА
XS1, XS2
PIN – 3 (папа)
------
2 шт
XR1, XR2
PIN – 3
(папа)
-------
2 шт
Jmp1 – Jmp4
джепер
перемычка
4 шт
SW1
Кнопка
Без
фиксации
--------
1 шт
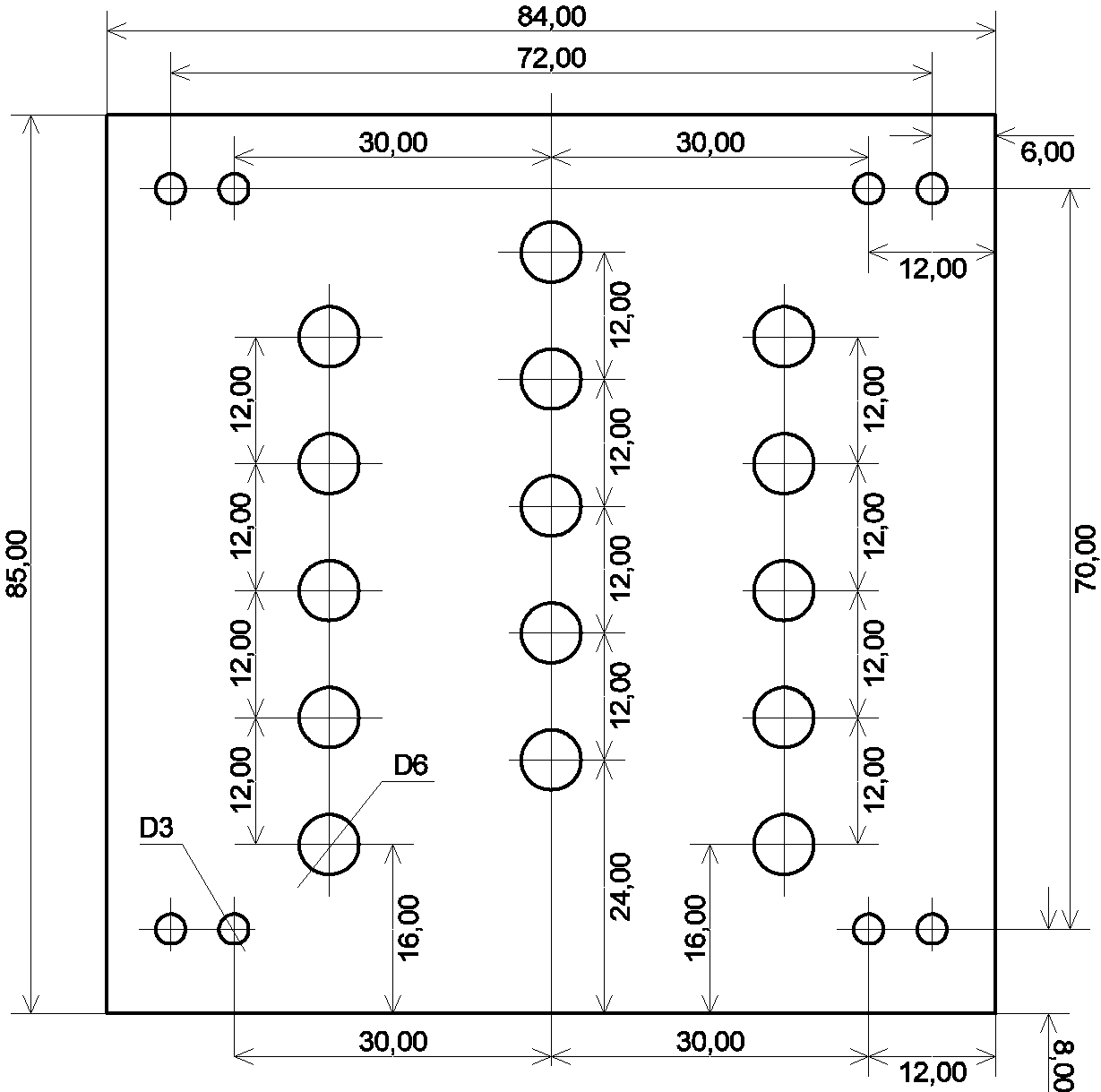
На место разъема XS3 впаиваются провода с вилкой. Для изготовления платы блока обработки сигнала по технологии ЛУТ, понадобится односторонний текстолит толщиной 1,5мм размером 85 х 85мм. Для изготовления платы датчиков понадобится текстолит толщиной 1,5мм размером 35 х 35мм. Отверстия для крепления платы к раме робота сверлятся сверлом диаметром 3мм, а для монтажа радиодеталей – 1мм.
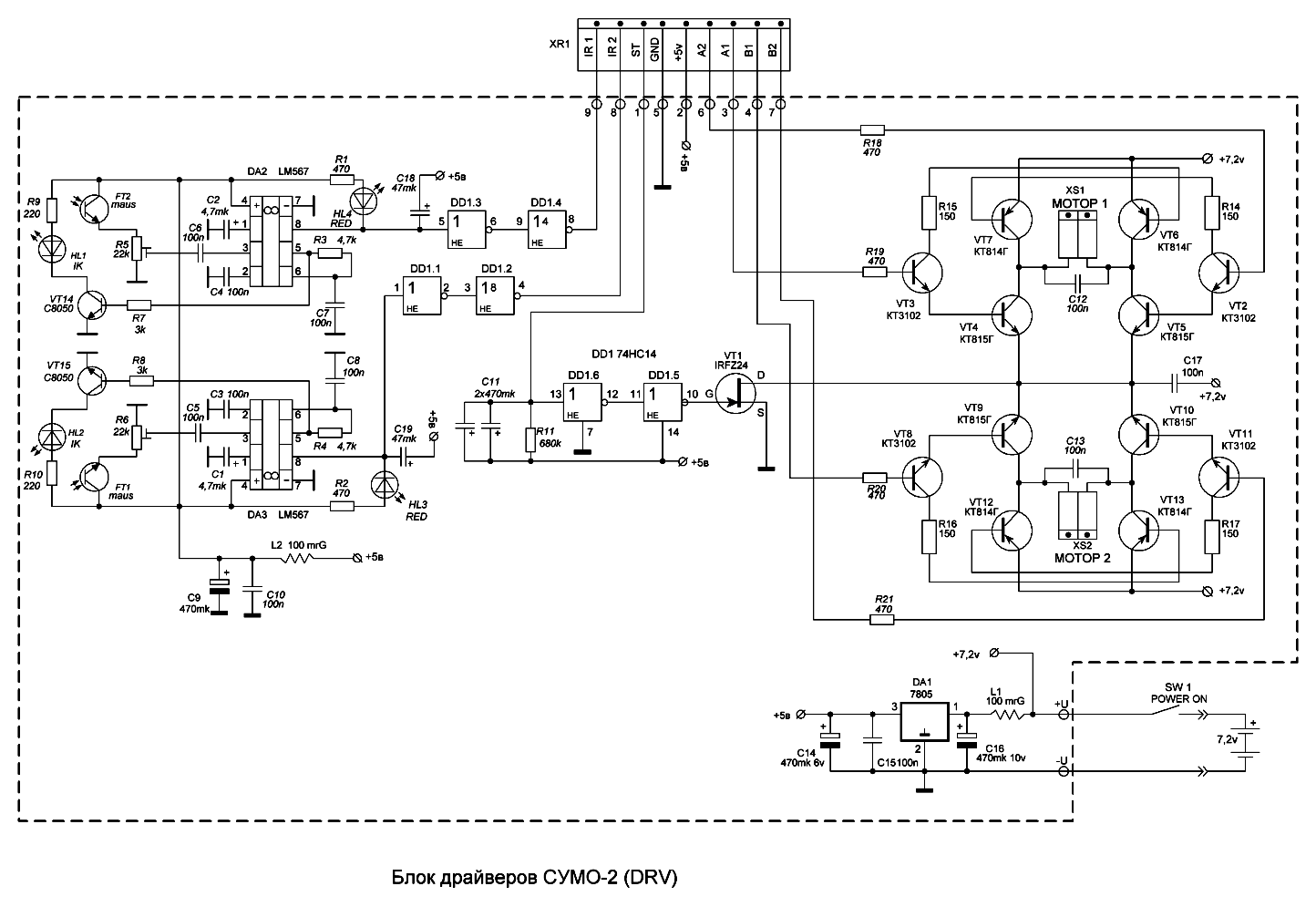
Блок драйвера для двигателей (DRV).
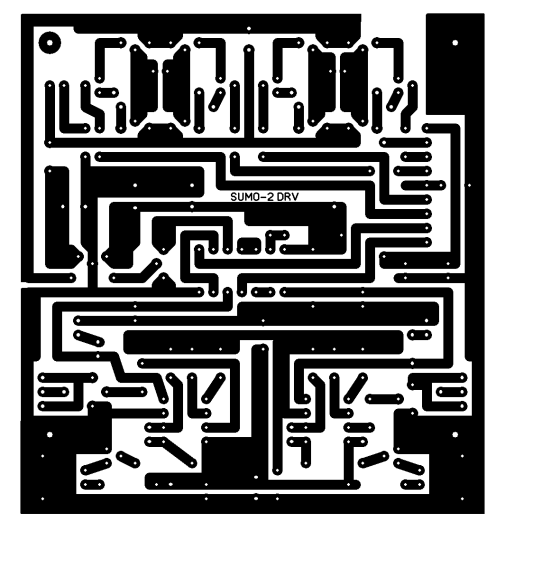
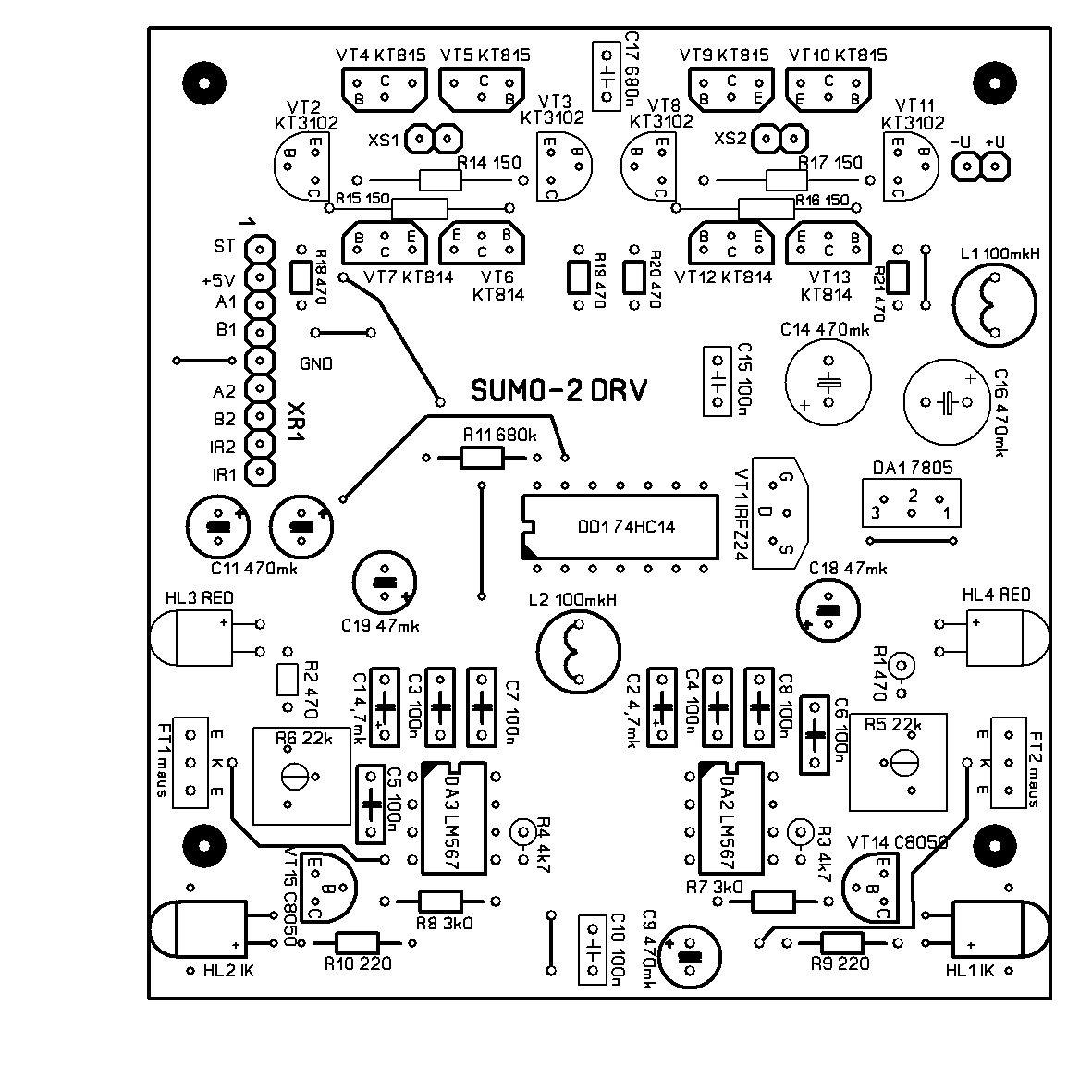
На рисунке 4 показана схема блока драйвера двигателей (DRV), на рисунке 5 монтажная и печатная платы блока.
Рисунок 4.
Конденсаторы С12 и С13 устанавливаются на двигателях, для подавления помех от щеток двигателя.
Рисунок 5.
Список радиодеталей блока управлением двигателями.
позиция
наименование
замена
количество
рисунок
РЕЗИСТОРЫ
R1, R2, R18, R19, R20, R21
470
510
6 шт
R3, R4
4,7К
3,3К
2 шт
R5, R6
22К
20К
2 шт
R7, R8
3к
3,3к
2 шт
R9, R10
220
180…270
2 шт
R11
680к
750к
1 шт
R14, R15, R16, R17
150
100…180
4 шт
КОНДЕНСАТОРЫ
C1,C2
электролит
4,7mk 10v
3,3mk 10v
2шт
C3, C4, C5,
C6, C7, C8, С10, С12, С13, С15
100n
150n
10 шт
С9, С11, С14, С16
470mk 10v
330mk 10v
4шт
C18, C19
47mk 6,3v
33mk 6,3v
2 шт
СВЕТОДИОДЫ
HL1, HL2
ИК диод
АЛ107
2 шт
HL3, HL4
красный
АЛ305
2 шт
ТРАНЗИСТОРЫ
VT1
IRFZ24
КП505
1 шт
VT2, VT3, VT8, VT11
КТ3102Б
С945
4 шт
VT4, VT5, VT9, VT10
КТ815Г
С8050
4 шт
VT6, VT7, VT12, VT13
КТ814Г
С8550
4 шт
VT14, VT15
С8050
КТ503
2 шт
FT1, FT2
Фототранзистор от мышки
-------
2 шт
МИКРОСХЕМЫ
DD1
74HC14
К555ЛН2
1 шт
DA1
LM7805
КР142ЕН5А
1шт
DA2, DA3
LM567
-------
2 шт
ДРОССЕЛЬ
L1, L2
100mH
120mH
2 шт
РАЗЪЕМЫ
XS1, XS2
PIN – 2 (папа)
------
2 шт
XR1
с проводами
PIN – 9 (мама)
--------
1шт
XR1,XR2
PIN – 2
(мама)
---------
2шт
ВЫКЛЮЧАТЕЛЬ
SW1
на замыкание
----------
1шт
Для изготовления платы блока управлением двигателями по технологии ЛУТ, понадобится текстолит толщиной 1,5мм размером 85 х 85 мм. Отверстия для крепления платы к раме робота сверлятся сверлом диаметром 3мм.
Механика, чертежи, инструкция по сборке
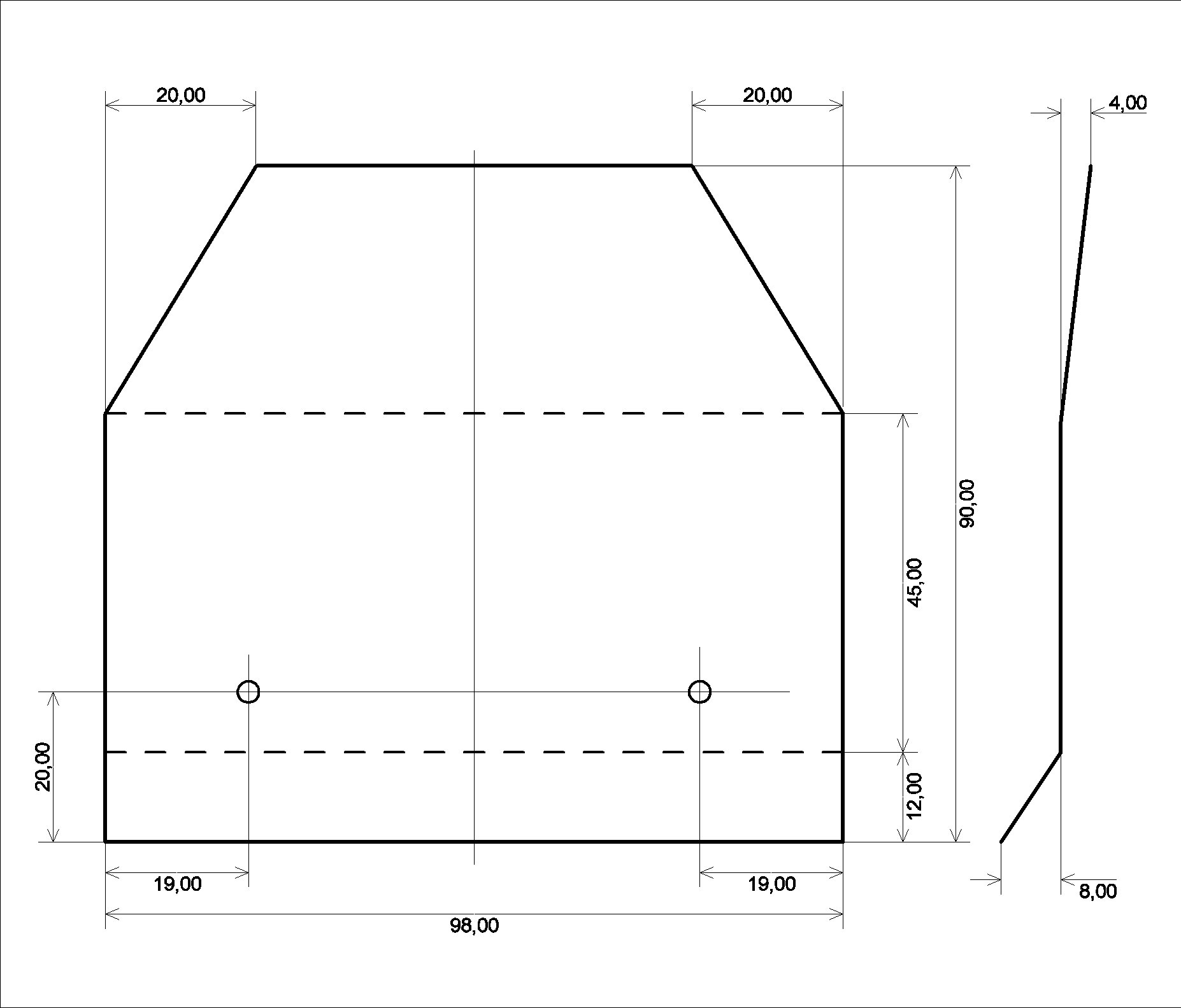
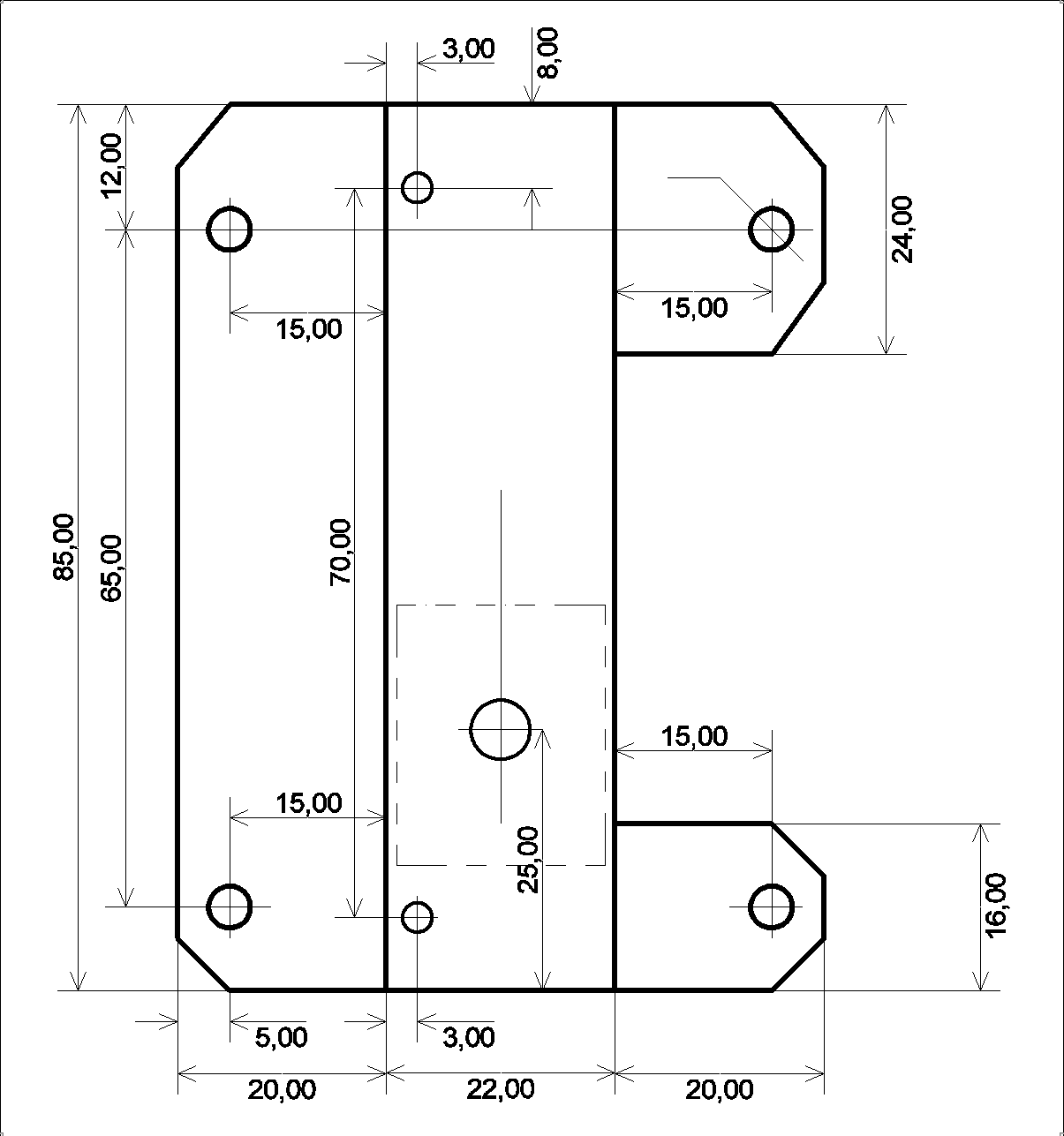
Рама и толкатель для робота вырезаются из жести по чертежам (Приложение №2). На раме устанавливаются стойки для крепления плат управления и защитного кожуха аккумуляторного отсека робота. В задней части рамы припаивается выключатель питания. Впереди рамы имеются отверстия, для установки датчиков контроля поверхности ринга и установки толкателя. Размеры робота потребовали весьма компактного размещения элементов на раме робота.
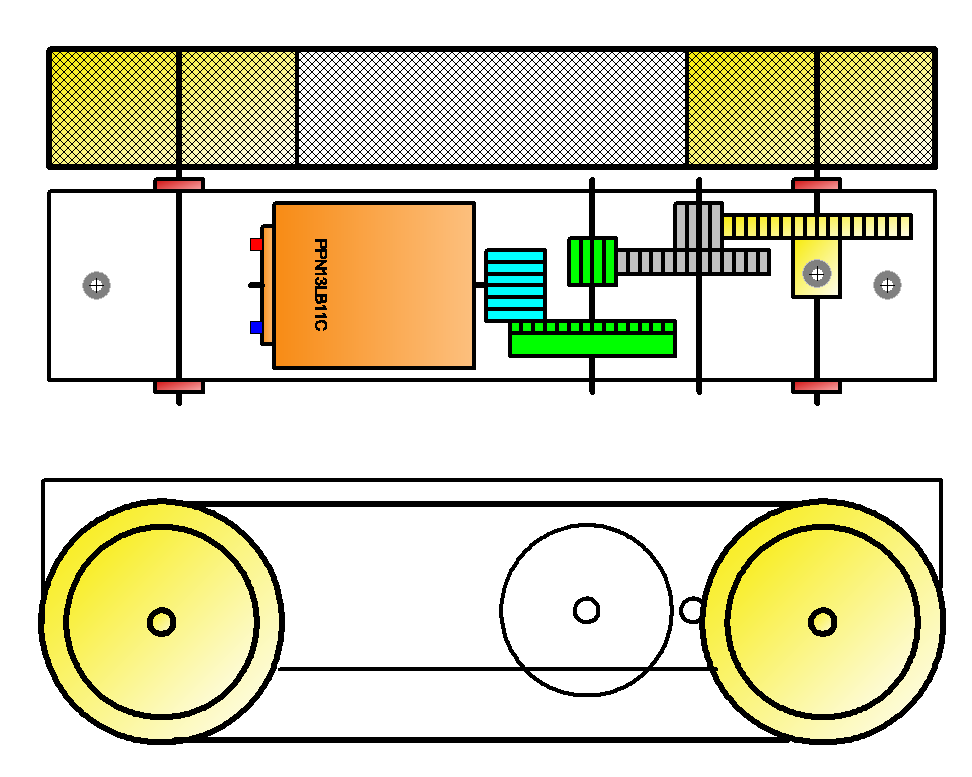
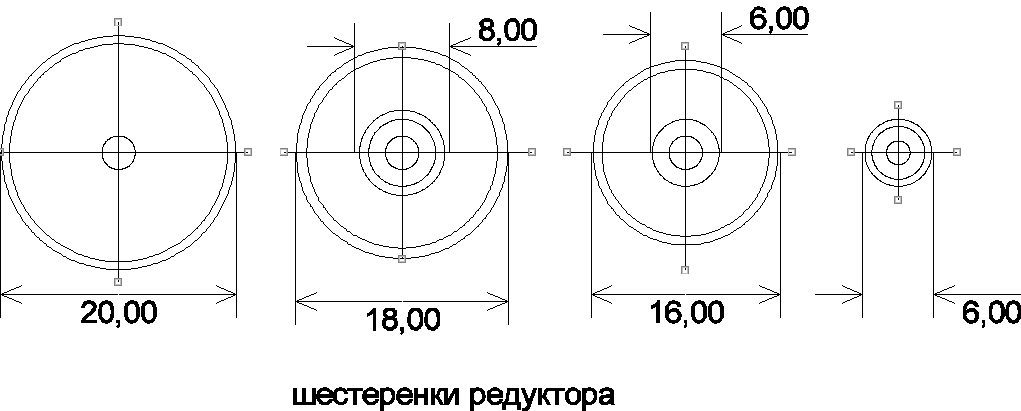
Шасси робота изготавливается из жести и состоит из двух независимых друг от друга редукторов на гусеничном ходу. Такой способ передвижения имеет преимущество перед колесными шасси, разворачивается практически на месте, и большая площадь сцепление с поверхностью ринга, что исключает пробуксовку колес. На рисунке 6 показано примерное расположение колес, шестеренок и двигателя на раме редуктора.
Разметка отверстий для крепления шестеренок на чертеже не приводятся и размечаются по месту, расстояние между центрами зависит от диаметра используемых шестеренок
Рисунок 6.
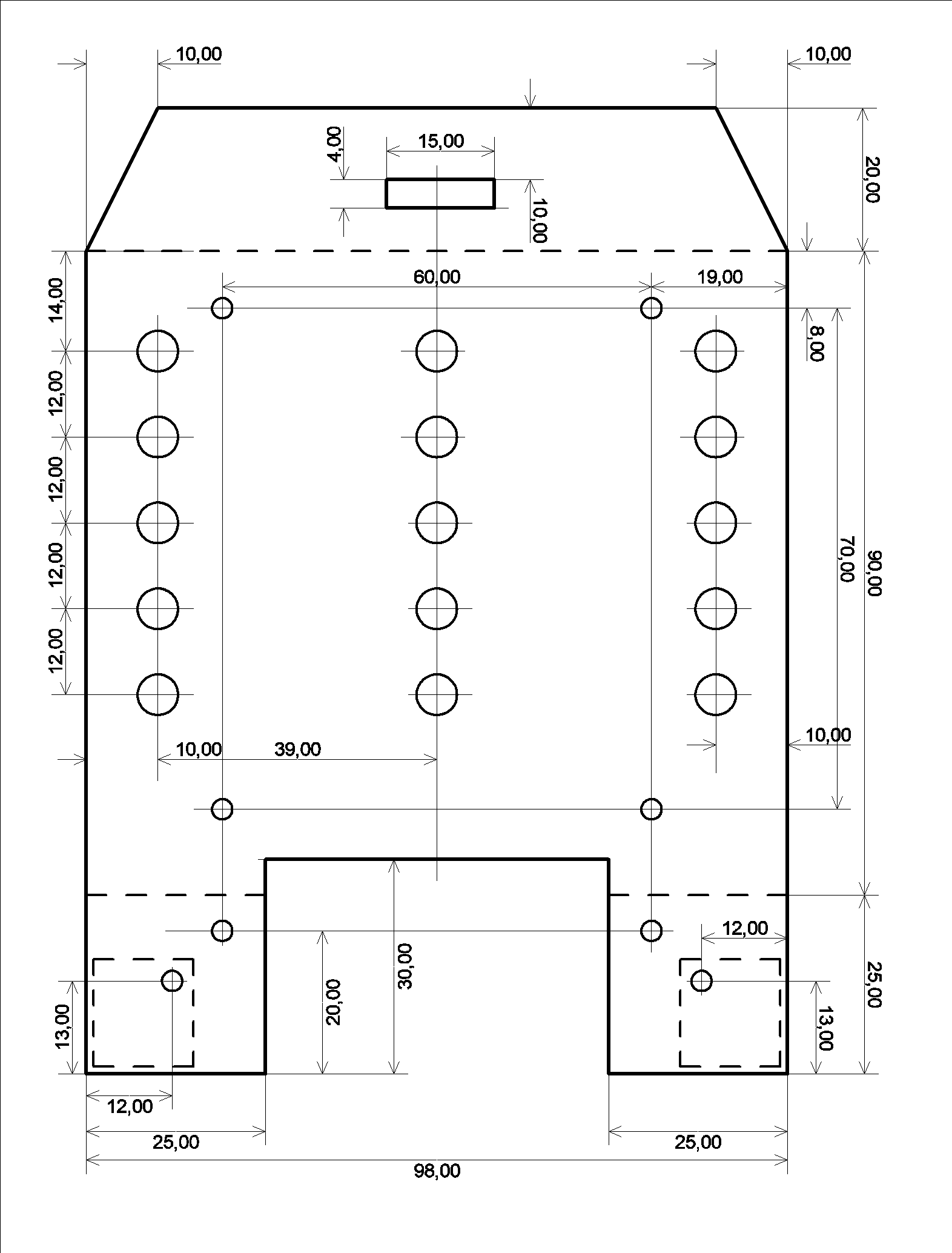
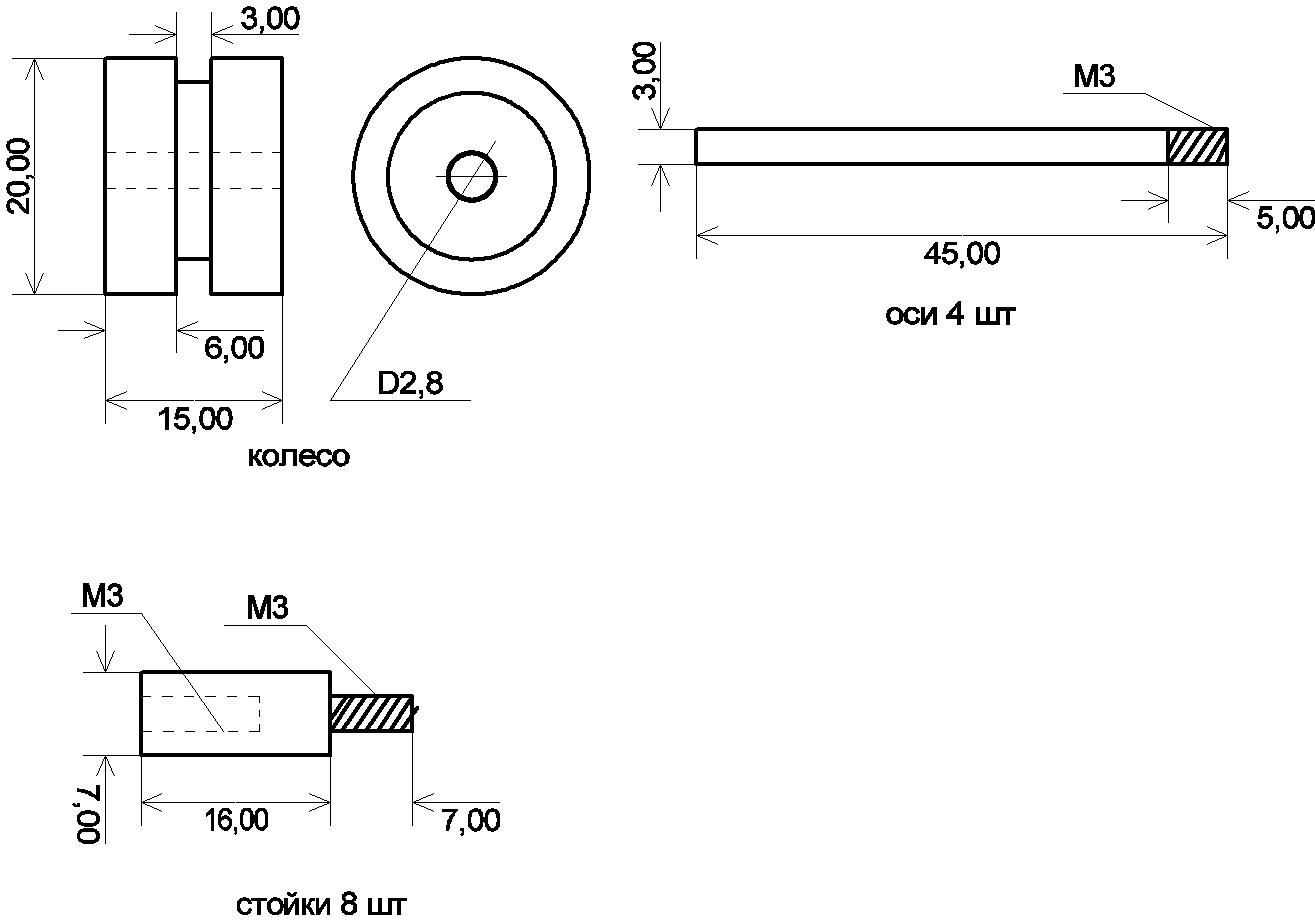
Чертеж рамы редуктора, размер осей, стоек для плат и размеры шестеренок показан в приложении №3. Вторая рама редуктора изготавливается зеркально (левая, правая).
Защитный кожух выпиливается из пластмассы. На него устанавливаются втулки для крепления платы блока драйвера двигателей (DRV). Он защищает плату от повреждений аккумулятором во время переворота.
Колеса из пластмассы или дюралюминия, проточки и сверления на стойках под нарезку резьбы, вытачиваются на токарном станке учителем.
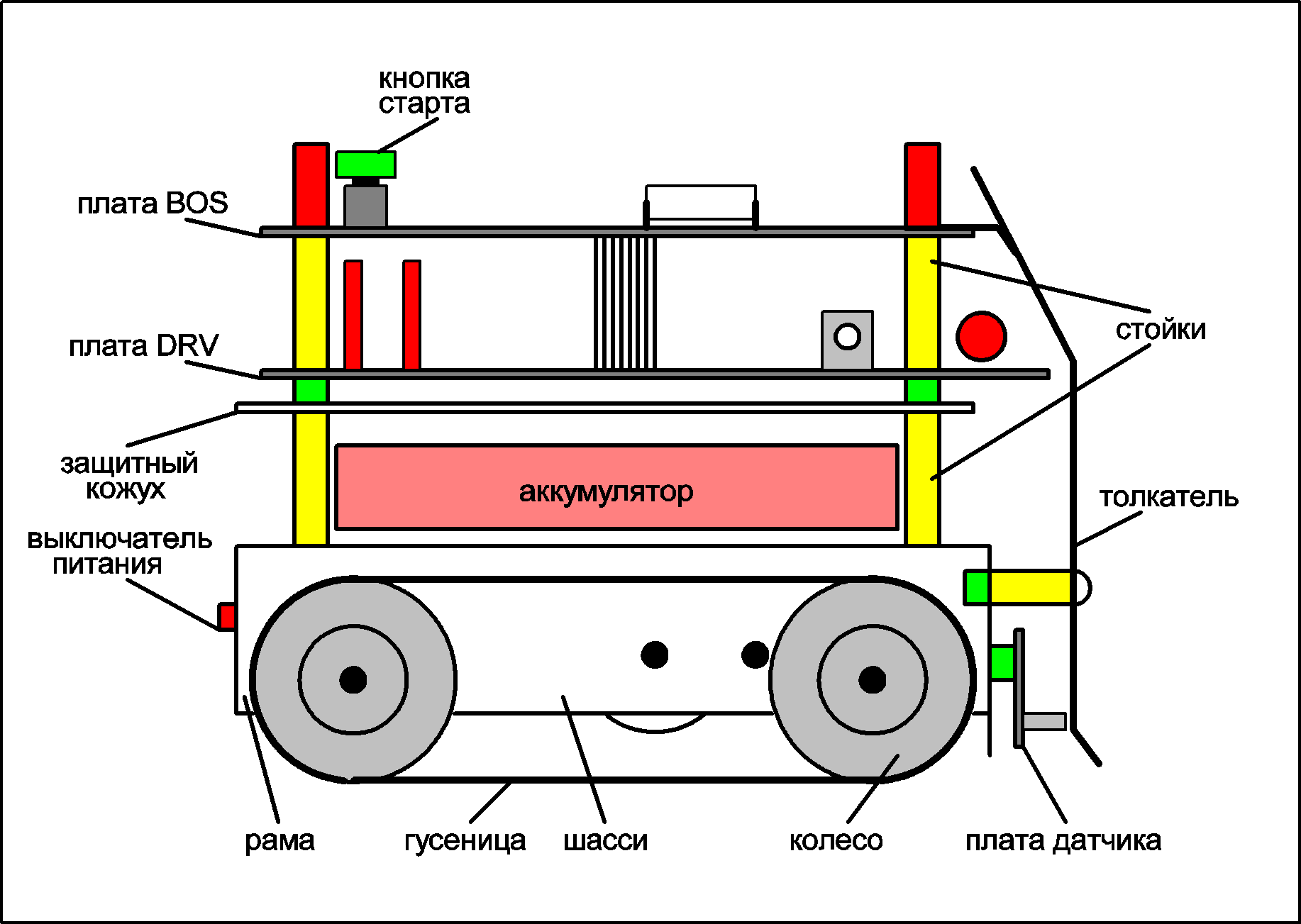
На рисунке 7 показано расположение плат электроники и деталей конструкций робота.
Рисунок 7.
Настройка робота
После сборки проверяют работоспособность шасси, подключив двигатель левого или правого редуктора к 2-м батарейкам (3В). Гусеницы должны вращаться свободно, без закусывания и торможений. Ток потребления двигателей на холостом ходу (гусеницы находятся в воздухе) измеряют тестером и он должен быть одинаковым, примерно от 40…160 мА.
Механика робота налажена, приступаем к наладке электроники. После установки и пайки радиодеталей на плату DRV, проводов, микросхемы в панельки пока не вставляем, проверяем качество пайки и наличие короткозамкнутых дорожек тестером и визуально. Вытаскиваем перемычки POL1, POL2, IR1 и IR2 из блока BOC. Подключаем аккумулятор 7,2 вольт, включаем питание выключателем SW1 (POWER). Тестером проверяем напряжение на выводе 3 стабилизатора DA1, и на 4 выводе микросхемы DA2, должно быть +5 вольт. Если это так, вставляем микросхему DA2 (LM567) в панельку. Щуп осциллографа подключаем к выводу 5 микросхемы DA2. На экране осциллографа должны быть четкие прямоугольные импульсы, с частотой следования 8…12кГц и амплитудой 2,5В. Если это не так, подбираем конденсатор С7.
Проверяем свечение инфракрасного светодиода HL1 с помощью видеокамеры (телефон, фотоаппарат). Щуп осциллографа подключаем к эммитору FT2 и регулируем яркость свечения HL1 подбором резистора R9, а иногда и R7, пока на экране не появятся такие же четкие прямоугольные импульсы с частотой и амплитудой, как на 5 выводе DA2.
Устанавливаем препятствие на расстоянии 30см от датчика поиска противника, затем резистором R5 увеличиваем чувствительность фототранзистора FT2 до тех пор, пока не засветится светодиод HL4. Убираем препятствие, светодиод HL4 должен погаснуть. Настройку датчика проводим несколько раз, для более четкой работы датчика. На движок резистор R5 можно капнуть краску или расплавленную канифоль, чтобы настройка не сбилась, когда робот будет участвовать в соревнованиях.
Настройка модуля драйвера не требуется, если все детали исправные и впаяны согласно расположению выводов на монтажной плате (база, коллектор, эммитор), то модуль начинает работать сразу. Двигатели подключаем к разъемам XS1 и XS2.
Время задержки включения робота (5 секунд) настраивают резистором R11, при уменьшении сопротивления время разряда конденсатора С11 уменьшается, а при увеличении сопротивления, увеличивается и время. На этом настройку блока драйверов завершают.
Следующий шаг, настраиваем модуль контроля поверхности ринга на плате блока обработки сигнала BOS. Для проверки работоспособности модуля включаем питание, контролируем напряжение тестером на дросселе L1 и выводе 8 микросхемы DA1, должно быть +5 вольт. Вставляем микросхему DA1 (LM393) в панельку.
Регулируем порог срабатывания компаратора DA1 для левого датчика построечным резистором R19. Когда фототранзистор FT1 находится над темной поверхностью ринга, либо ее полное отсутствие, загорается светодиод HL4. Когда фототранзистор FT1 находится над белой поверхностью, ограничение ринга, светодиод HL4 должен погаснуть. Яркость свечения ИК диода HL5 регулируют резистором R12, и контролируют тестером напряжение от 0,8…1,2В.
Настройка контроля поверхности для правого датчика аналогична – резистором R20, порог срабатывания, а яркость свечения ИК диода HL6 резистором R13.
Устанавливаем перемычки POL1, POL2 на место. При включении питания SW1 (POWER), если нет препятствий, на выводах микросхемы DD1 (74HCТ240) присутствуют: вывод 14- ноль (А2), вывод 5- единица (А1), вывод 12- ноль (В2), вывод 8- единица (В1), робот движется вперед. Если не так, поменять полярность питания двигателя, который вращается не в ту сторону. При смене логических единиц на выводах микросхемы, выезд робота на белую ограничительную линию, загораются светодиоды HL1 HL2, робот должен повернуть от белой линии. Если это не так, нужно поменять местами разъемы XR2 с XR1, провести повторно настройку датчиков поверхности. При встрече робота с белой полосой слева, он должен повернуть вправо, и при встрече справа – влево.
Возвращаем перемычки IR1, IR2 на место. Устанавливаем робота на ринг. Включаем питание, робот должен находиться в состоянии покоя, нажимаем кнопку SW1 Start, через 5 секунд робот начнет прямолинейное движение. Допустим, противник слева, отраженный от противника ИК сигнал принимает левый фототранзистор FT1. В этом случае происходит быстрая зарядка конденсаторов С1. На входах D1.2 возникают уровни логического нуля, а на D1.3 будут единицы. В модуле драйвера транзисторы VT4, VT6 закрываются, но открываются VT7, VT5, полярность питания электродвигателя М1 меняется на обратную, электродвигателя М2 остановится, робот повернется в левую сторону. Разрядка конденсатора C1 через резистор R2 прекращается, прямолинейное движение возобновляется.
Если противник находится на стороне фототранзистор FT2, справа, то все происходит точно так же, но работают уже цепи C2 – R3. В результате, робот повернет теперь вправо. Для более точного разворота можно подобрать резисторы R2 и R3.
Противник слева – поворот влево, противник справа – поворот вправо. Угол обзора одного датчика составляет 1100, противник находящийся прямо по курсу следования робота не виден. Но это ненадолго, так как оба робота двигаются по рингу, и через некоторое время (максимум 3 сек) противник попадет в поле зрения одного из датчиков, робот начнет атаку противника.
Материалы, инструменты и оборудование
Перечень материала и инструмента для изготовления робота
Оцинкованную или черную жесть толщиной 0,3мм – 0,4мм, размером 210 х 300мм.
Пластмасса толщиной 3мм, размером 240 х 140мм.
4 колеса, диаметром 22мм, шириной 20мм.
2 гусеницы шириной 20мм, длинной 180мм.
Набор шестеренок для двух трехступенчатых редукторов с передачей вращения под углом 900 от двигателя.
Пруток металлический диаметром 7мм, длиной 400мм.
Гайки М 3 - 12 шт.
Болты под потай диаметром 3мм длинной 8мм - 12шт.
Проволока диаметром 3мм, длиной 400мм (сварочный электрод).
Провода для монтажа сечением 0,5мм2 разных цветов, длиной примерно 250см.
Гетинакс фольгированный 1,5мм, размером 170 х 100мм.
Припой ПОС-60 с канифолью диаметром 3мм, длиной 100см.
Паяльная кислота 10мл.
Паяльник 100Вт и 40Вт 220в.
Набор слесарного и монтажного инструмента.
Сверла диаметром 2,5мм, 2,8мм, 3,0мм, 5.0…7,0мм
Резбонарезной инструмент М3 (плашка и метчик).
Наждачная бумага №10, №40 размером 210 х 300мм.
Сверлильный станок.
Краска полиакриловая в баллончиках, грунтовка 1 баллон, черного цвета 1 баллон и желтого цвета 1 баллон.
Радиодетали выпаивались из плат списанной аппаратуры.
Инфракрасные светодиоды использовали от пультов управления телевизоров. Фототранзисторы, от шариковых компьютерных мышек.
Микросхемы для датчиков покупались в магазине радиодеталей.
Измерительные приборы, мультиметр (тестер) и осциллограф.
Заключение
Данная методическая разработка была апробирована в робототехническом объединении учащимися 7 клласса. Изготовлены четыре мини робота сумоиста и проведены соревнования.
Конструкторские и изобретательские навыки при испытаниях позволили проанализировать работу модели в критических ситуациях, усовершенствовать, и добавить свои конструкторские мысли в модель. Элементы соревновательного момента подтвердили наличие полученных знаний о правилах соревнований и современных методах управления в спортивной робототехнике.
Источники информации
Литература:
Ньютон С. Брага. М. Создание роботов в домашних условиях, НТ. Пресс 2007.
А.П. Кашкаров. 500 схем для радиолюбителей. Электронные датчики. Наука и Техника. 2008.
Р.Аношин. «Робот-жук». Радиодело №3 2006
Оуэн Бишоп. Настольная книга разработчика роботов. Киев. «МК Пресс» 2010.
www.http://robozone.su робототехника для начинающих.
http://www.railab.ru/images/begin/course/materials/course3/metod3.htm Мобильные минироботы Часть III.
https://www.youtube.com/watch?v=H9-SRB4NsVg видео соревнований мини роботов сумо на Фестивале науки 2010 г.
Приложение к методической разработке
Приложение №1
Регламент соревнований по МИНИ СУМО
Регламент соревнований по МИНИ-СУМО 2.0 от 14.02.2010 по версии Открытого робототехнического турнира на Кубок Политехнического музея.
Регламент основан на правилах FSI All Japan Robot Sumo Tournament (перевод robosport.ru).
1. Условия состязания
Состязание проходит между двумя роботами (командами). Цель состязания - вытолкнуть робота-противника за пределы ринга.
Поединок состоит из трех раундов и проводится до 2-х побед одного из роботов. Роботы должны быть включены или инициализированы вручную в начале раунда по команде судьи, после чего они должны оставаться неподвижным в течение 5 секунд. После старта не допускается никакое вмешательство в управление роботом и ход поединка.
Робот считается покинувшим ринг, если какая-либо часть робота коснулась поля за пределами ринга (внешняя вертикальная стенка ринга считается "за пределами").
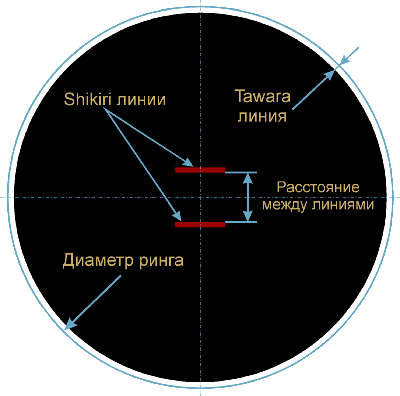
2. Ринг
Ринг представляет собой площадку круглой формы. Поверхность ринга черная. По периметру ринга проходит белая ограничительная линия.
Диаметр ринга - 77 см.
Высота ринга - 2,5 см
Цвет ринга - черный.
Цвет ограничительной линии Tawara - белый.
Ширина ограничительной линии Tawara - 2,5 см.
В центре ринга могут быть нанесены две параллельных линии Shikiri коричневого цвета.
Ширина линий Shikiri - 1 см.
Длина линий Shikiri - 10 см.
Расстояние между линиями Shikiri - 10 см.
Помимо линий Shikiri на ринге могут быть нанесены линии, определяющие возможные зоны старта (зоны расстановки роботов).
В случае отсутствия линий стартовые зоны определяются судьей.
Во время проведения поединка вокруг ринга должна соблюдаться свободная зона шириной не менее 1 м. Свободная зона вокруг ринга может быть отмечена специальным образом. Нахождение участника в свободной зоне во время поединка наказывается штрафом.
3. Робот
Робот должен быть автономным. Предельные габариты робота в начальном состоянии: ширина - 10 см, длина - 10 см. Предельные габариты робота в разложенном состоянии: ширина - 14 см, длина - 14 см. Высота робота не ограничена. Масса робота - не более 500 гр.
Робот должен быть оснащен кнопкой «Старт». После нажатия кнопки «Старт» робот должен оставаться в неподвижном состоянии в течение 5 секунд и лишь, затем имеет право переходить к активным действиям.
Во время проведения поединка робот должен быть оснащен легкоразличимой меткой - номером, назначаемым каждому участнику соревнований.
В момент начала движения робот может однократно изменить свои размеры - перейти в «разложенное состояние». При этом габариты робота в разложенном состоянии по длине и ширине не должны превышать 14 на 14 см.
Запрещено использование каких-либо клейких приспособлений на колесах и корпусе робота.
Запрещено использование каких-либо приспособлений, дающих роботу повышенную устойчивость, например, создающих вакуумную среду.
Запрещено создание помех для ИК и других датчиков робота-соперника, а также помех для электронного оборудования.
Запрещено использовать приспособления, бросающие что-либо в робота-соперника или запутывающие его.
Запрещено использовать жидкие, порошковые и воздушные вещества, в качестве оружия против робота-соперника.
Запрещено использовать легковоспламеняющиеся вещества.
Переконфигурация робота
Участники имеют право на оперативное конструктивное изменение робота между раундами и матчами (в т.ч. - ремонт, замена элементов питания и проч.), если внесенные изменения не противоречат требованиям, предъявляемых к конструкции робота и не нарушают регламентов соревнований.
4. Поединок
Поединок состоит из 3-х раундов.
Максимальная общая продолжительность раунда - 90 секунд, за исключением специального решения судьи.
Каждая команда соревнуется за получение зачетных очков, дающихся судьями за выталкивание соперника за пределы ринга.
Команда, получившая второе очко или выигравшая 2 раунда, выигрывает весь поединок. Если победитель поединка не определен за три раунда, назначается дополнительный раунд или победитель может определяться судейским решением, основывающимся на боевой активности роботов во время проведенных раундов.
Поединок считается законченным после объявления судьей его результатов. Команда, покинувшая место проведения поединка до объявления главного судьи о конце поединка, считается проигравшей поединок.
5. Начало и остановка раунда
Перед началом поединка и между раундами судья имеет право проверить характеристики робота на предмет соответствия п.3 настоящего регламента. В случае обнаружения нарушений требований п.3. участнику присуждается поражение в поединке. Если роботы обоих участников не соответствуют техническим требованиям, оба участника могут быть сняты с соревнований.
Расстановка роботов
Перед началом раунда роботы устанавливаются на ринге, каждый в своей зоне. Разграничение зон определяют линии Shikiri.
Робот или часть робота не должны выходить за пределы линии Shikiri на сторону противника.
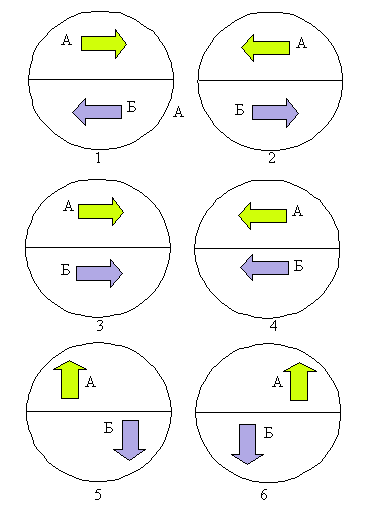
Взаимное расположение роботов определяется путем жеребьевки. Всего определено 6 начальных (стартовых) позиций. Карточку с указанием позиции в первом раунде выбирает участник, указанный первым в турнирной таблице.
Варианты начальной расстановки:
Все настройки роботов осуществляются до жеребьевки, определяющей взаимное расположение участников.
Начало поединка
О начале раунда объявляет судья, после чего участники ждут команду судьи о старте.
При получении этой команды участники одновременно нажимают пусковые кнопки, расположенные на роботах, и немедленно покидают внешнюю область вокруг ринга. Ширина свободной зоны вокруг ринга должна быть не менее 1 м. Это делается для того, чтобы не создавать помех роботам. Присутствие в свободной зоне во время поединка наказывается штрафом.
Роботам разрешено начинать активные действия спустя 5 секунд после нажатия пусковой кнопки.
Судья имеет право самостоятельно осуществлять как расстановку роботов по результатам жеребьевки, так и нажатие пусковых кнопок, обозначенных участниками до жеребьевки.
Прерывание старта
Каждая команда один раз может остановить старт раунда без начисления штрафа, но не позднее, чем за 1 секунду до окончания обратного 5-секундного отсчета. Задержка старта разрешена не более чем на 30 секунд. После устранения неполадки роботы вновь устанавливаются на старт.
Предупреждения (штрафы)
В ходе поединка участники могут получить не более трех предупреждений - штрафов. Второе предупреждение, полученное участником по любому поводу в течение раунда, означает поражение в раунде. Третье означает поражение в поединке.
Фальстарт
Если робот начинает движение во время пятисекундного обратного отсчета, это считается фальстартом.
Фальстартом также считается нажатие пусковой кнопки до получения команды судьи.
За фальстарт участник получает предупреждение, после чего роботы вновь устанавливаются на стартовые позиции.
Остановка поединка
Раунд останавливается и возобновляется только после того, как судья объявляет об этом.
Раунд может быть остановлен и снова начат судьей после того, как:
Оба робота сцепились и остановились на одном месте более чем на 5 секунд без каких либо новых действий с их стороны. Если происходят какие-то новые действия со стороны любого из роботов, судья может увеличить время клинча до 30 секунд.
Если роботы остановились более чем на 5 секунд без какого либо контакта между собой или двигаются по рингу без контакта между собой, судья может увеличить время до остановки раунда до 30 секунд.
Если оба робота одновременно оказались, снаружи ринга и нет возможности определить, кто это сделал первым, то назначается новое начало раунда.
Время между раундами не должно превышать 30 секунд и может быть увеличено только по решению судьи.
Команда может попросить остановить раунд и поединок в случае поломки своего робота. Если команда не имела до этого штрафов и просьба об остановке поединка поступила от команды впервые, судья может отложить поединок на 5 минут для устранения поломки. В любом случае команде присуждается поражение в раунде.
Если неисправность не устранена в течение 5 минут, то команде засчитывается поражение в поединке.
Изменение размеров робота
По истечении времени обратного отсчета в момент начала движения робот может однократно изменить свои размеры. При этом габариты робота в разложенном состоянии по длине и ширине не должны превышать 14 на 14 см.
6. Победные очки и штрафы за нарушения
Очко дается в следующих случаях:
Робот соперника вытеснен за пределы ринга (робот касается какой-либо своей частью поля за пределами ринга).
Робот соперника самостоятельно покинул ринг.
Один из роботов остановился более чем на 5 секунд раньше другого. В этом случае одно очко присуждается последнему.
Робот все время вел себя гораздо активней своего соперника. Если один из роботов явно не пытается атаковать своего соперника, сопернику спустя 10 секунд может быть присуждено одно очко.
Штрафы могут быть присуждены в следующих случаях:
Кто-либо из команды нарушил пределы свободной зоны во время раунда.
Робот начал движение раньше истечения 5 секунд после команды о начале раунда (технический фальстарт).
Фальстарт оператора робота (оператор нажал стартовую кнопку раньше команды судьи).
Высказаны требования об остановке поединка без веских на то оснований.
Задержано начало раунда дольше, чем на 30 секунд без особого распоряжения судьи.
Во время поединка выявлены несоответствия робота п.3. настоящего регламента.
Некорректное поведение участников.
Команде, нарушившей последние два пункта о штрафах, присуждается поражение в поединке.
В остальных случаях каждое нарушение суммируется. После первого нарушения команда предупреждается. После второго нарушения команде присуждается поражение в раунде и одно очко отдается сопернику. После третьего предупреждения команде присуждается поражение в раунде, поединке и второе очко отдается сопернику. Каждое нарушение суммируется только для текущего поединка. В следующих поединках они не учитываются.
7. Судейство
Для проведения поединков назначаются судья и ассистент (второй арбитр). Ассистент ведет протоколы поединков, отмечая, по решению судьи, штрафные и выигрышные очки.