Презентация для занятия по "Робототехнике" на тему "Датчик касания"
Создайте Ваш сайт учителя Видеоуроки Олимпиады Вебинары для учителей
Презентация для занятия по "Робототехнике" на тему "Датчик касания"
Вы уже знаете о суперспособностях современного учителя?

Тратить минимум сил на подготовку и проведение уроков.

Быстро и объективно проверять знания учащихся.

Сделать изучение нового материала максимально понятным.

Избавить себя от подбора заданий и их проверки после уроков.

Наладить дисциплину на своих уроках.

Получить возможность работать творчески.
Просмотр содержимого документа
«Презентация для занятия по "Робототехнике" на тему "Датчик касания"»

Занятие по робототехнике
Тема: « Датчик касания ».
В состав конструктора «Lego Мindstorms EV3» входят различные датчики. Главная задача датчиков - представлять информацию из внешней среды модулю EV3, а задача программиста - научиться получать и обрабатывать эту информацию, подавая необходимые команды моторам робота. На протяжении ряда занятий мы будем последовательно знакомиться со всеми датчиками, входящими и в домашний, и в образовательный наборы, научимся взаимодействовать с ними и решать наиболее распространенные задачи управления роботом.
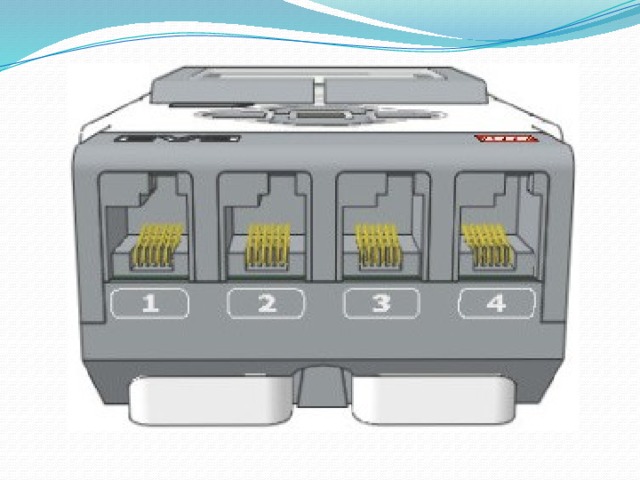
Для подключения датчиков к модулю EV3 предназначены порты, обозначенные цифрами "1" , "2" , "3" и "4" .
Таким образом, к одному модулю EV3 одновременно можно подключить до четырех различных датчиков. Все порты абсолютно равнозначны и вы можете подключать датчики к любым портам, главное - будьте внимательны при указании номера порта для соответствующих датчиков в ваших программах.


Первым датчиком, который мы изучим, будет датчик касания
Этот датчик, по сути, представляет собой специальную кнопку, которая может находиться в двух состояниях:
«Нажатие» или «Освобождение».
Также, последовательный переход в состояние «Нажатие» , а затем «Освобождение» называется: «Щелчок» и может обрабатываться программой, как самостоятельное событие.

Режим измерения
Задача:
Включить мигание красной подсветки , если датчик нажат , и непрерывную красную подсветку, если датчик касания не нажат.
Не забудьте поставить паузу, иначе подсветка никогда не будет мерцать, так как скорость выполнения цикла выше, чем скорость мерцания.

Режим сравнения
Режим сравнения позволяет определить три состояния датчика
- Кнопка нажата
- Не нажата
- Произошло нажатие и отпускание кнопки

Режим сравнения
Управление операторами
Какие же инструменты представляет нам среда программирования для получения информации с датчиков и реагирования на эту информацию в программе? Давайте начнем знакомиться с программными блоками, расположенными в Оранжевой палитре, которая называется "Управление операторами".
Программные блоки Оранжевой палитры, не смотря на свою малочисленность, очень важны! С помощью этих блоков мы можем обрабатывать массу событий и условий и сложно представить практическую программу, которая может обойтись без этих блоков.
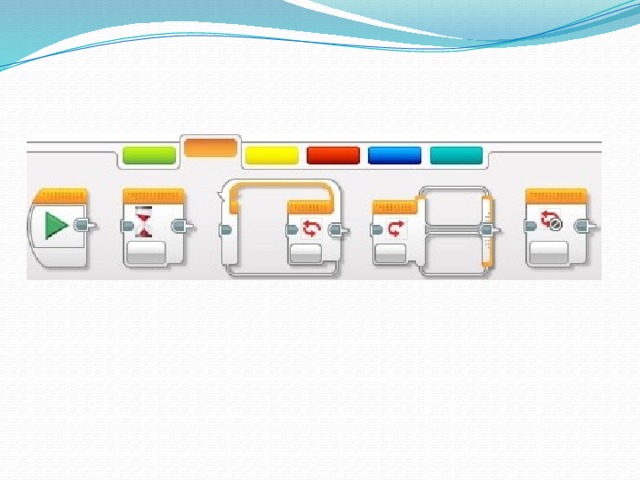
- С самым первым блоком Оранжевой палитры мы уже с вами знакомы: он называется "Начало" . Именно с него начинаются все программы для роботов.
- Второй программный блок называется "Ожидание" . Этот блок заставляет программу ожидать выполнения какого-либо условия или наступления какого-либо события. Пока не выполнится условие, установленное в этом блоке, программа не перейдет к выполнению следующих программных блоков! Если перед тем, как начнется выполнение блока "Ожидание" были включены, какие-либо моторы, то они будут продолжать вращаться с установленной скоростью.
Третий программный блок называется "Цикл" . Этот блок многократно выполняет программные блоки, вложенные внутрь его, пока не будет выполнено условие завершения цикла, заданное в настройках блока.
Следующий программный блок называется "Переключатель" . Он служит для того, чтобы в зависимости от заданных условий - выполнить одну последовательность программных блоков, вложенных в один из своих контейнеров.
Заключительный программный блок называется "Прерывание цикла" . Его предназначение - досрочное прекращение выполнения заданного цикла.
Программные блоки "Ожидание" , "Цикл" и "Переключатель" имеют множество режимов и соответствующих настроек, знакомиться с которыми мы будем на практических примерах, последовательно и с наглядными пояснениями.
Задача: необходимо написать программу, запускающую движение робота по щелчку кнопки.
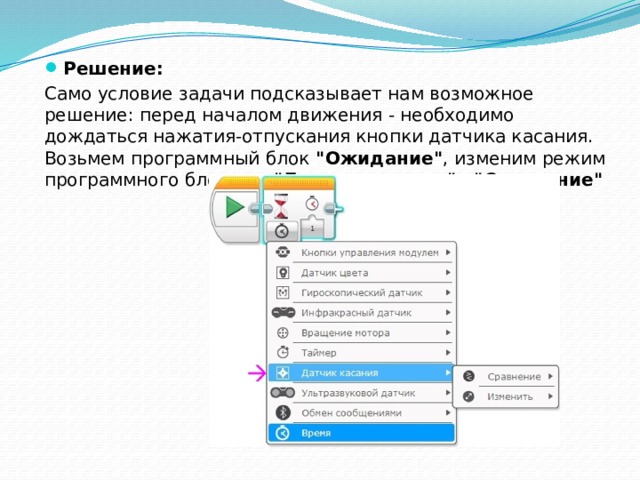
- Решение:
Само условие задачи подсказывает нам возможное решение: перед началом движения - необходимо дождаться нажатия-отпускания кнопки датчика касания. Возьмем программный блок "Ожидание" , изменим режим программного блока на "Датчик касания" - "Сравнение"
- Как можно увидеть - программный блок "Ожидание" сменил свое отображение! Рядом с песочными часами появилось изображение датчика касания, помогающее в программе визуально оценивать установленный режим работы. Настройка программного блока "Состояние" задает требуемое состояние датчика, достижение которого прекратит выполнение блока "Ожидание" . Настройка "Состояние" может принимать следующие значение: "0" - "Отпущено" , "1" - "Нажатие" , "2" - "Щелчок" . Для решения нашей задачи выберем состояние "Щелчок" . Вывод "Измеренное значение« при необходимости позволяет передать окончательное состояние датчика для обработки в другой программный блок.
Итак: при такой настройке блока ожидания выполнение нашей программы будет остановлено до нажатия-отпускания кнопки датчика касания. Только после "Щелчка" выполнение будет передано следующему программному блоку. Установим после блока ожидания один программный блок "Рулевое управление" , загрузим программу в робота и убедимся в правильности её выполнения!

Задача: необходимо написать программу, останавливающую робота, столкнувшегося с препятствием.
Из датчика касания давайте соберем небольшой бампер, который будет нам сигнализировать о том, что наш робот столкнулся с препятствием. Ниже приведены подробные инструкции для сборки, как из домашней, так и из образовательной версии конструктора Lego Мindstorms EV3. Можете поэкспериментировать и придумать собственный вариант конструкции.
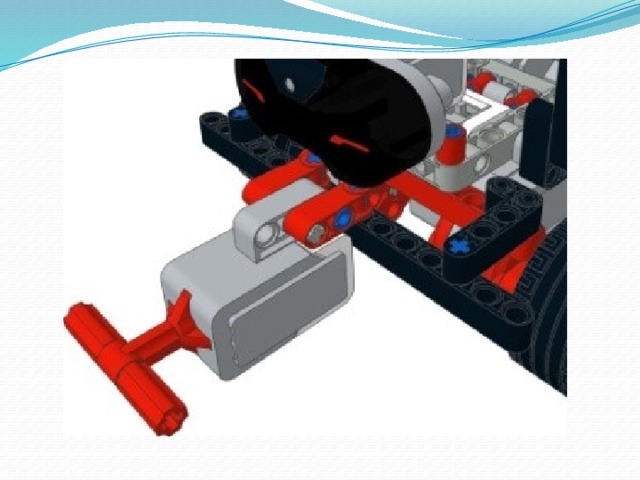
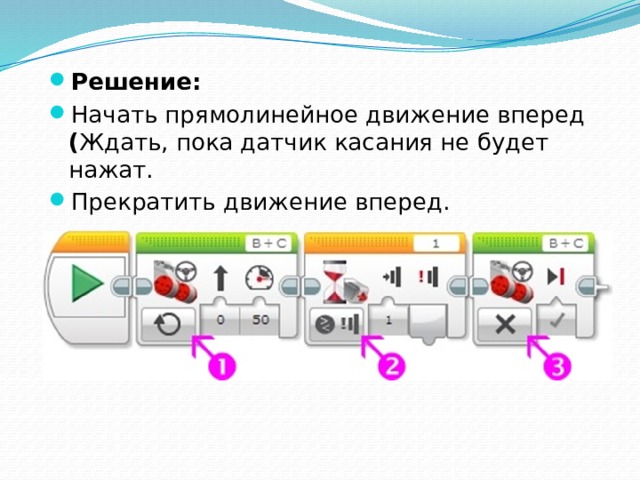
- Решение:
- Начать прямолинейное движение вперед ( Ждать, пока датчик касания не будет нажат.
- Прекратить движение вперед.
- Для решения следующей задачи нам понадобится программный блок "Цикл" Оранжевой палитры.
- Задача: необходимо написать программу, заставляющую робота двигаться вперед, при наезде на препятствие - отъезжать назад, поворачивать вправо на 90 градусов и продолжать движение вперед до следующего препятствия.
- Подсказка: напишите и протестируйте программу движения - отъезда - поворота , а затем поместите эти блоки внутрь программного блока "Цикл" .








Похожие файлы
Полезное для учителя




Распродажа видеоуроков!

1410 руб.
2350 руб.

1410 руб.
2350 руб.

2190 руб.
3650 руб.

1060 руб.
1760 руб.
ПОЛУЧИТЕ СВИДЕТЕЛЬСТВО МГНОВЕННО

* Свидетельство о публикации выдается БЕСПЛАТНО, СРАЗУ же после добавления Вами Вашей работы на сайт
Удобный поиск материалов для учителей
Проверка свидетельства