Мобильный автономный робот «MARK» (Mobile Autonomous Robot system Kinect.) системы Kinect (управление инфракрасным светом), способен объезжать препятствия, и не бояться упасть в пропасть, передвигаться по намеченному маршруту или по черной линии.
Робота можно применить в соревнованиях «Лабиринт», «Гонки по линии». Если на робота установить воздушную пушку, то можно участвовать в соревнованиях пожарных роботов.
Данная методическая разработка направлена на достижение следующих целей и задач:
создание универсального мобильного робота, который может решать ряд задач в области инфракрасного автоматического управления;
реализации различных моделей поведения и применения ВЕАМ методов в робототехнике;
разработка архитектуры универсального мобильного робота и ее реализация;
самостоятельное изготовление учащимися системы управления инфракрасным светом;
воспитание всестороннего интереса к технике, творческого отношения к труду.
Работа рассчитана на учащихся 13 – 20 лет, и является приложением к образовательной программе «Робототехника». Для освоения специальной терминологией и изучения различных моделей поведения и применения ВЕАМ методов в робототехнике предлагается следующая методика изучения:
самостоятельное изготовление корпуса и шасси робота по чертежам (приложение);
самостоятельное изготовление и настройка электронной начинки мобильного робота;
Вы уже знаете о суперспособностях современного учителя?
Тратить минимум сил на подготовку и проведение уроков.
Быстро и объективно проверять знания учащихся.
Сделать изучение нового материала максимально понятным.
Избавить себя от подбора заданий и их проверки после уроков.
Просмотр содержимого документа
«Мобильный робот МАРК»
Муниципальное бюджетное образовательное учреждение
дополнительного образования детей Станция юных техников
города Каменск-Шахтинский
Мобильный робот «МАРК»
Методическая разработка
(Для руководителей детских робототехнических объединений учреждений дополнительного образования)
Автор: Анпока В Е.
педагог дополнительного образования.
2016 г.
Содержание
страницы
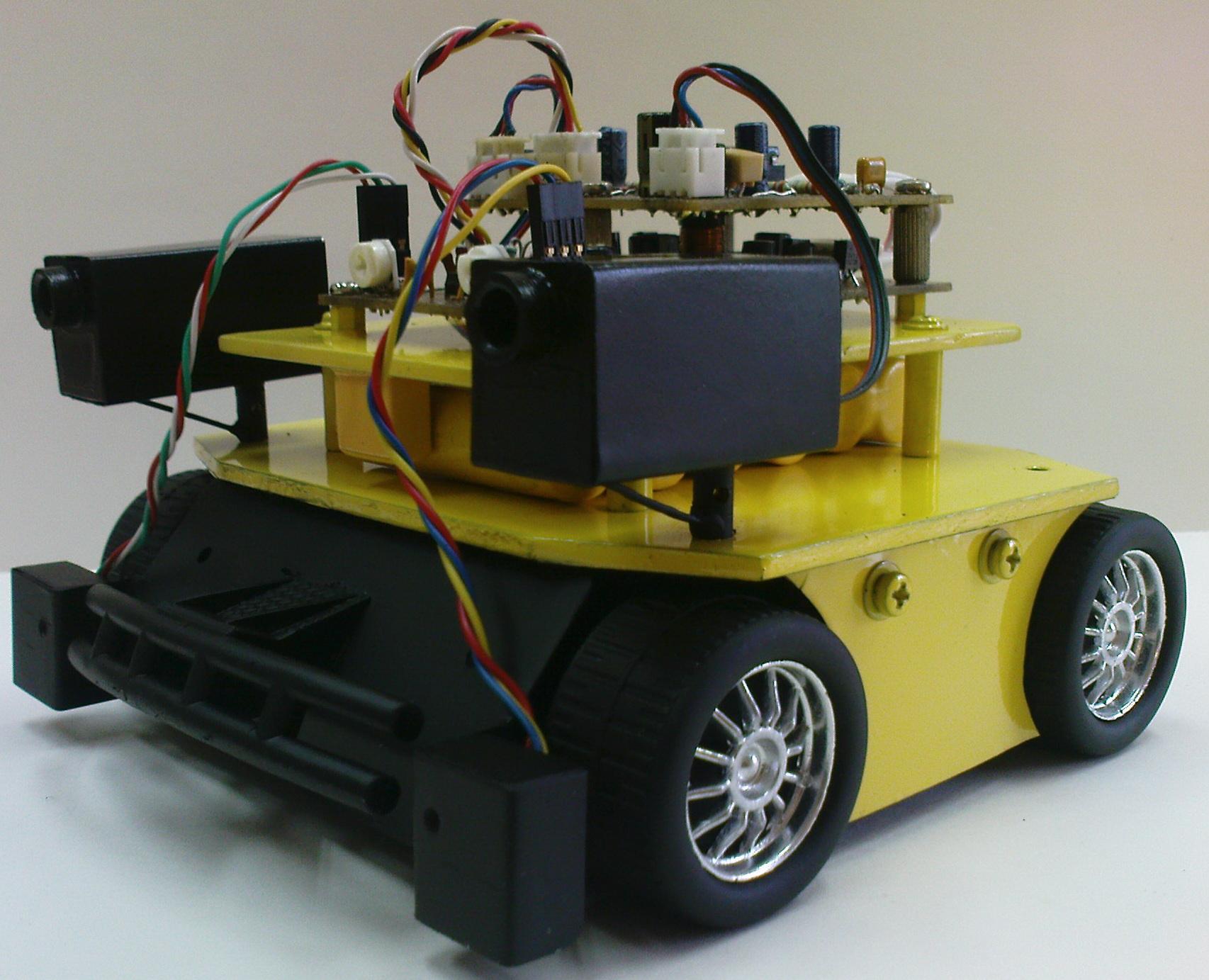
Фотография робота «МАРК»
3
1.
Пояснительная записка
4
2.
Этапы изготовления узлов и сборка робота
5
2.1.
Электроника
5
2.2.
Принцип работы
6
2.3.
Блок обработки сигнала
7
2.4.
Блок драйвера для двигателей
9
2.5.
Блок датчиков препятствий
11
2.6.
Блок датчиков поверхности
13
3.
Корпус и шасси для робота
15
4.
Настройка робота
16
5.
Материалы, инструменты и оборудование
17
6.
Заключение
18
7.
Источники информации
18
8.
Приложение
19
Фотография робота «МАРК»
Пояснительная записка
Мобильный автономный робот «MARK» (Mobile Autonomous Robot system Kinect.) системы Kinect (управление инфракрасным светом), способен объезжать препятствия, и не бояться упасть в пропасть, передвигаться по намеченному маршруту или по черной линии.
Робота можно применить в соревнованиях «Лабиринт», «Гонки по линии». Если на робота установить воздушную пушку, то можно участвовать в соревнованиях пожарных роботов.
Данная методическая разработка направлена на достижение следующих целей и задач:
создание универсального мобильного робота, который может решать ряд задач в области инфракрасного автоматического управления;
реализации различных моделей поведения и применения ВЕАМ методов в робототехнике;
разработка архитектуры универсального мобильного робота и ее реализация;
самостоятельное изготовление учащимися системы управления инфракрасным светом;
воспитание всестороннего интереса к технике, творческого отношения к труду.
Работа рассчитана на учащихся 13 – 20 лет, и является приложением к образовательной программе «Робототехника». Для освоения специальной терминологией и изучения различных моделей поведения и применения ВЕАМ методов в робототехнике предлагается следующая методика изучения:
самостоятельное изготовление корпуса и шасси робота по чертежам (приложение);
самостоятельное изготовление и настройка электронной начинки мобильного робота;
2. Этапы изготовления узлов и сборка робота
2.1. Электроника
В состав робота входят следующие блоки:
Блок обработки сигналов с датчиков (ВОС).
Блок драйверов для двигателей (DRV).
Блок датчиков пола.
Блок датчиков препятствий (D1 – D4).
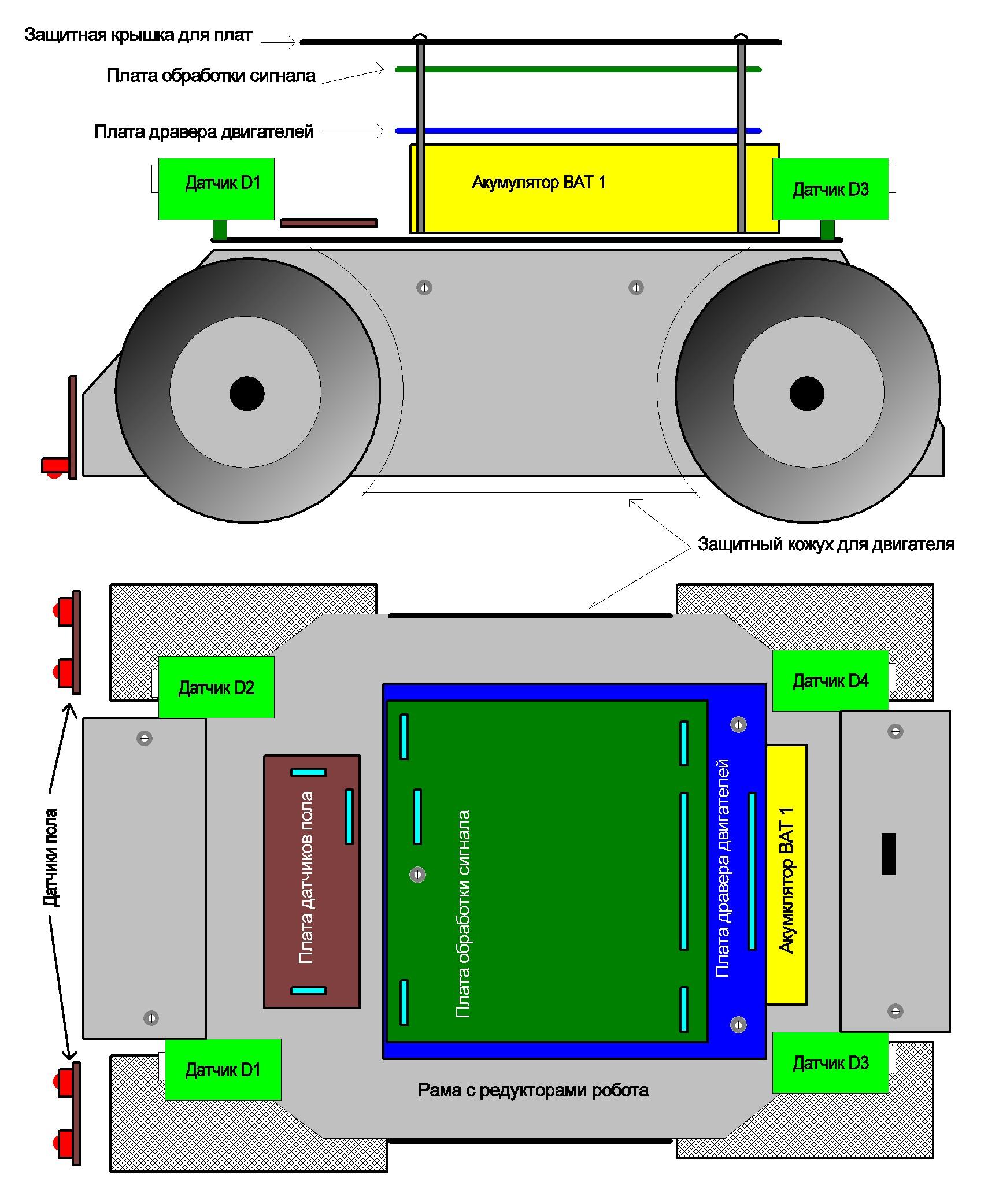
Расположение на роботе блоков.
2.2. Принцип работы
Спереди и сзади корпуса, по его углам расположены оптические датчики D1 – D4. Которые определяют расположение препятствия (левый, правый), расстояние до препятствия. Внизу установлены датчики поверхности, для определения препятствия на полу и места положения робота на маршруте.
Все команды с датчиков поступают на блок обработки сигналов. Блок обработки сигналов анализирует сигналы и отправляет соответствующие команды на блок драйверов, которые управляют исполнительными механизмами, двигателями. Робот совершает маневр, в зависимости от расположения препятствия, и объезжает его. На рисунке показаны расположения основных блоков робота.
Схемы мобильного робота MARK на жесткой логике показаны на рисунках и очень просты в повторении. В отличие от микроконтроллерного оригинала на роботе установлены дополнительные датчики, которые, при использовании микросхемы К561ЛЕ5, заставляют робота послушно останавливаться, если вы занесли над ним руку (или мухобойку). В этом исполнении третий датчик направлен вертикально вверх. Если микросхему К561ЛЕ5 заменить на К561ЛА7, а третий датчик направить вниз и под небольшим углом вперед, робот сможет ездить по столу, не опасаясь падения на пол.
В отсутствие препятствия оба мотора вращаются, робот едет вперед. Появление препятствия перед датчиком вызывает смену полярности питания мотора (смену направления вращения). Например, при встрече препятствия впереди слева, правый мотор станет тянуть робота назад, а левый будет продолжать двигать его вперед. В результате робот будет поворачивать вправо до тех пор, пока препятствие слева не выйдет из поля зрения левого датчика. Затем, прямолинейное движение возобновится. Аналогично при появлении препятствия справа, но поворот будет влево. По такому же принципу работают и датчики поверхности.
Робот питается от батареек или аккумуляторов напряжением 6…9 вольт.
Расположение выводов (цоколевка) радиодеталей показана в приложении 1.
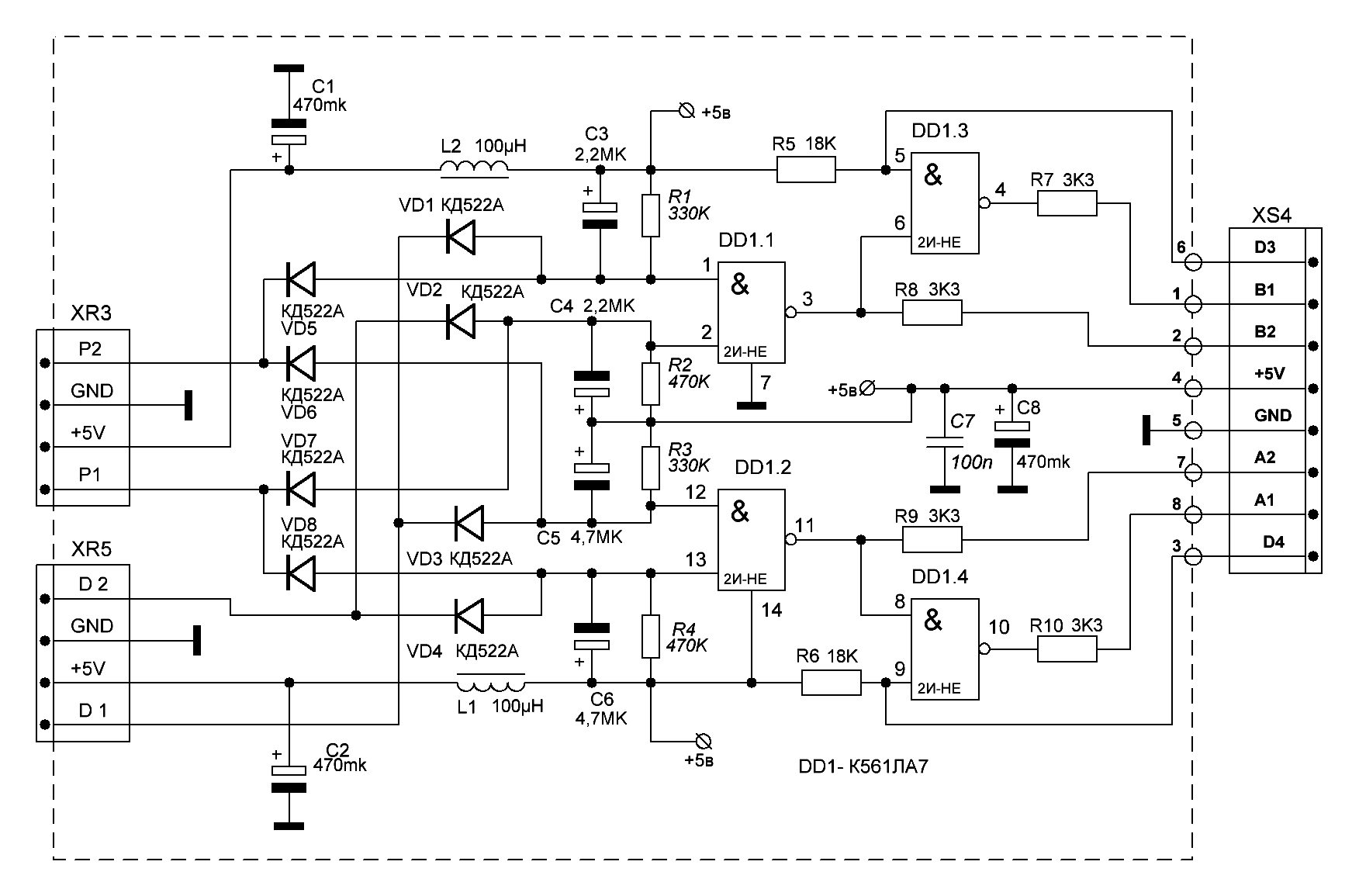
2.3. Блок обработки сигнала
На рисунке показана схема блока обработки сигнала (BOC). На элементах D1.1 и D1.2 выполнены времязадающие цепи. Сигналы управления должны быть «ноль» Микросхему К561ЛА7 можно заменить зарубежным аналогом CD4011A.
Список радиодеталей блока обработки сигнала.
позиция
наименование
замена
количество
рисунок
РЕЗИСТОРЫ
R1, R3
330к
390к
2 шт
R2, R4
470к
510к
2 шт
R5, R6
18k
15к
2 шт
R7,R8, R9, R10
3,3k
2,2к
4 шт
ДИОДЫ
VD1, VD2, VD3, VD4, VD5, VD6, VD7, VD8
1N4148
КД522А
8 шт
КОНДЕНСАТОРЫ
C1, C2, C8
электролит
1000mk 6,3v
470mk 6,3v
3шт
C3, C5
электролит
2,2mk 10v
------
2шт
C4, C6
электролит
4,7mk 10v
------
2шт
C7
100n
150n
1шт
МИКРОСХЕМА
DD1
CD4011A
К561ЛА7
1шт
ДРОССЕЛЬ
L1, L2
100mH
120mH
2шт
РАЗЪЕМЫ
XR3, XR5
PIN – 4 (папа)
------
2шт
XS4
PIN - 8
(папа)
-------
1шт
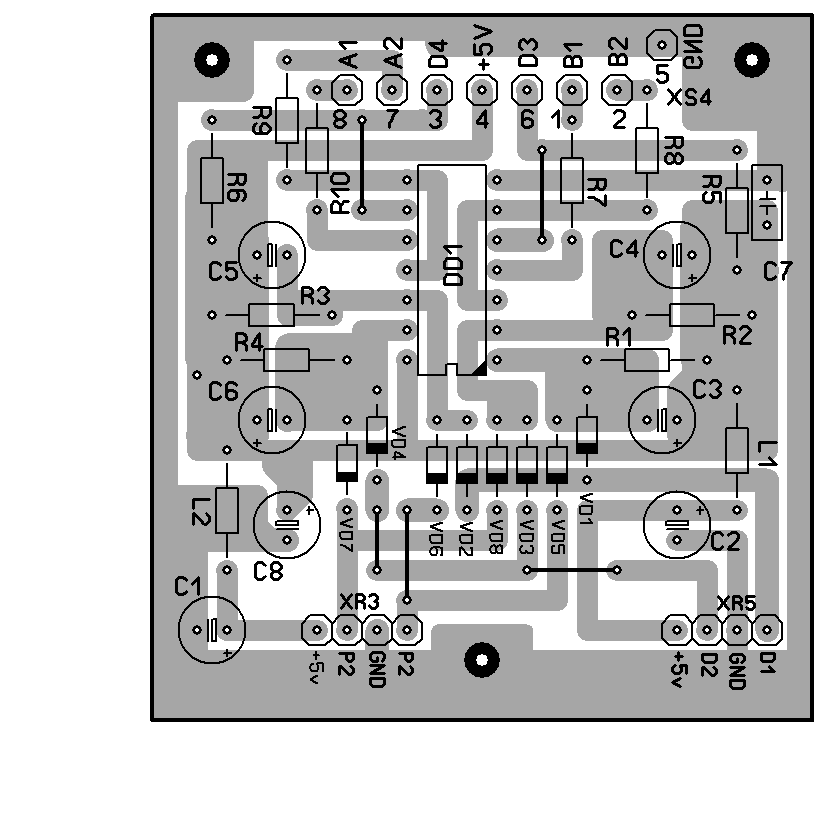
На место разъема XR1 впаиваются провода с вилкой. Для изготовления платы блока обработки сигнала по технологии ЛУТ, понадобится текстолит размером 60 х 65мм.
Схема модуля обработки сигнала (BOC).
Печатная и монтажная платы модуля обработки сигнала.
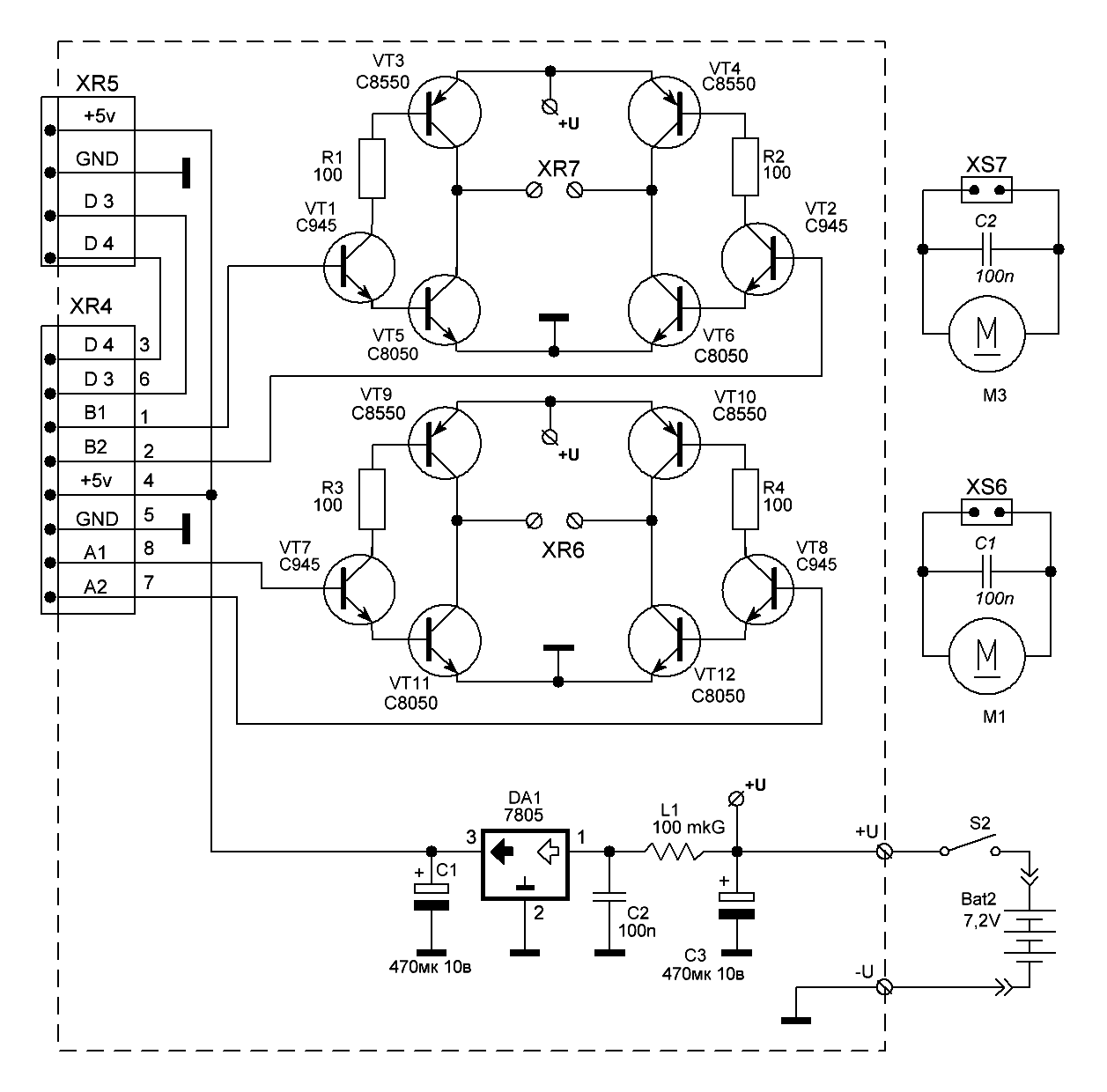
2.4. Блок драйвера для двигателей
На рисунке показана схема блока управлением двигателями, драйвер (DRV). Конденсаторы С1 и С2 устанавливаются на двигателях. В настройке блок не нуждается.
Список радиодеталей блока управлением двигателями.
позиция
наименование
замена
количество
рисунок
РЕЗИСТОРЫ
R1, R2, R3, R4
100 om
91 om
4 шт
КОНДЕНСАТОРЫ
C1,C3
электролит
470mk 10v
330mk 10v
2шт
C2,
100n
150n
1шт
ТРАНЗИСТОРЫ
VT3, VT4, VT9, VT10
С8550
КТ814Г
4шт
VT5, VT6, VT11, VT12
С8050
КТ815Г
4шт
VT1, VT2, VT7, VT8
С945
КТ3102Б
4шт
ДРОССЕЛЬ
L1
100mH
120mH
1шт
РАЗЪЕМЫ
XR5
PIN – 4 (папа)
------
1шт
XR4
PIN – 8 (папа)
--------
1шт
XR7, XR6
PIN - 2
(папа)
-------
2шт
XS7,XS8
PIN – 2
(мама)
---------
2шт
СТАБИЛИЗАТОР
DA1
LM7805
КР142ЕН5А
1шт
ВЫКЛЮЧАТЕЛЬ
S2
На замыкание
----------
1шт
Для изготовления платы блока управлением двигателями по технологии ЛУТ, понадобится текстолит размером 65 х 60 мм.
Принципиальная схема блока управлением двигателями (DRV).
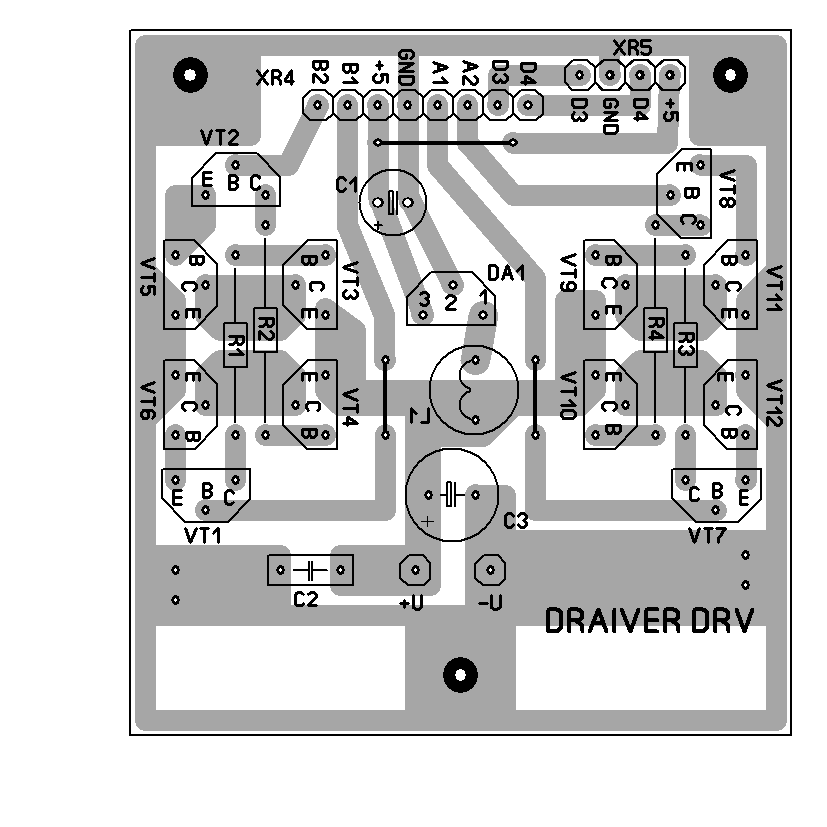
Печатная и монтажная платы блока управлением двигателями.
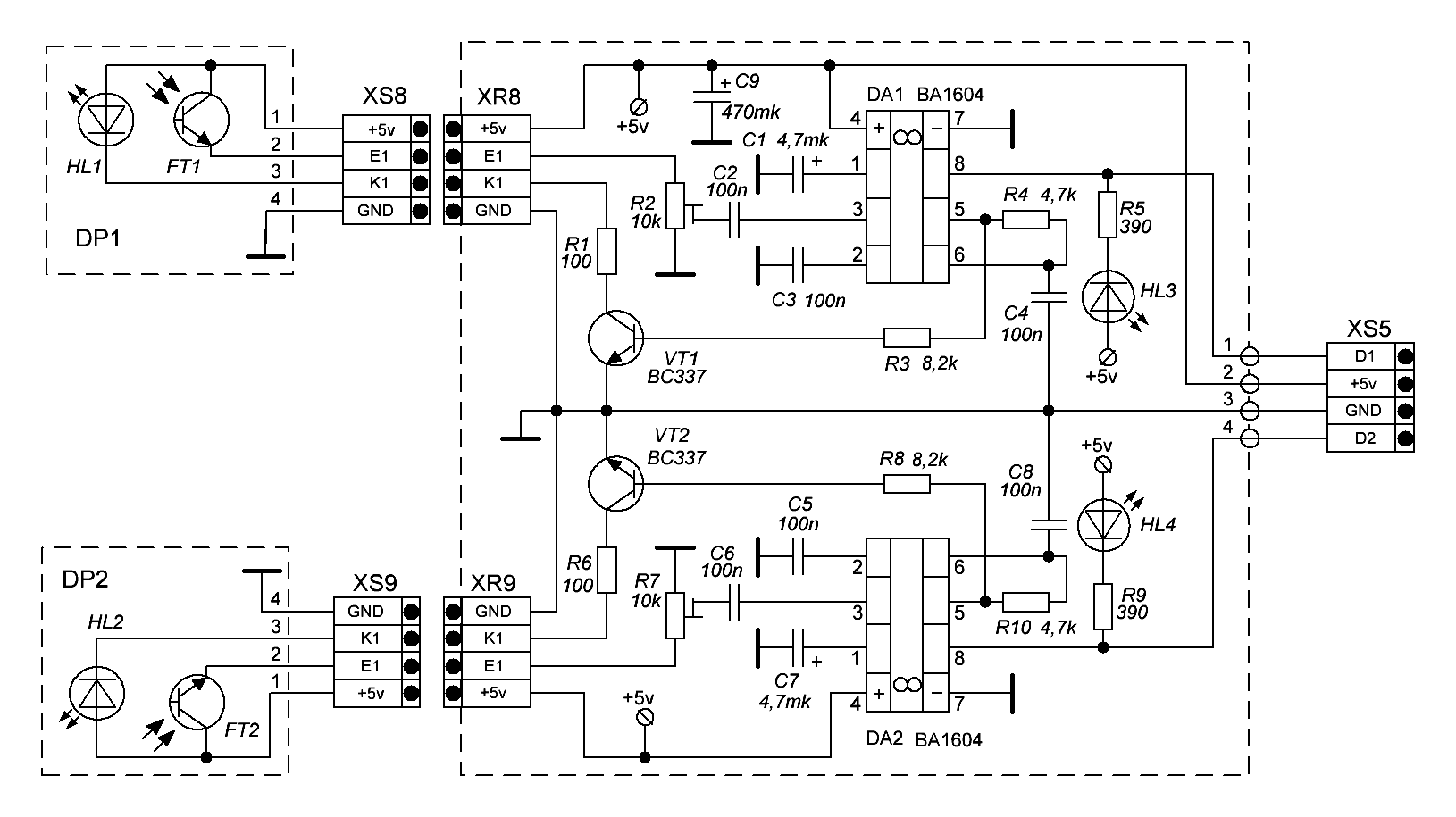
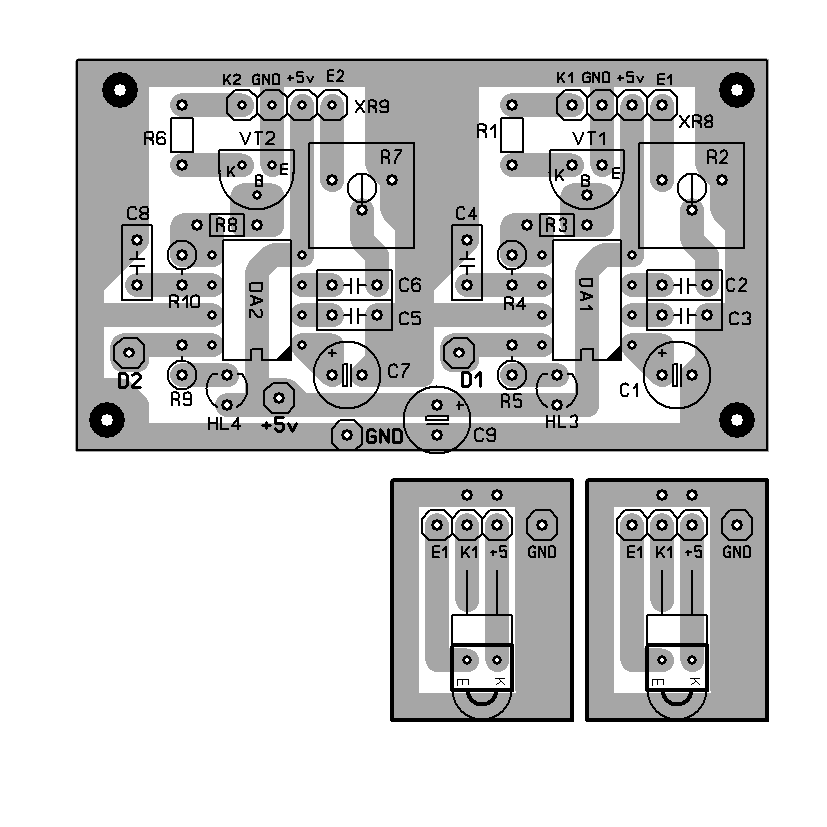
2.5. Блок датчиков препятствий
На рисунке показана схема датчиков препятствий, DР1 (левый) и DР2 (правый). Импульсы частотой 10…12 кГц вырабатываются генератором на специализированной микросхеме DA1 и DA2 - ВА1604. Резистором R2 и R7 регулируют дальность обнаружения препятствия, резисторами R1 и R6 – яркость излучения инфракрасных диодов HL1 и HL2.
Список радиодеталей блока датчиков препятствий.
позиция
наименование
замена
количество
рисунок
РЕЗИСТОРЫ
R1, R6
100 om
120 om
2 шт
R2, R7
подстроечный
10k
4,7к
2 шт
R3,R8
8,2k
5,6к
2 шт
R4, R10
4,7к
4,2к
2 шт
R5, R9
390 om
470 om
2 шт
ДИОДЫ
HL1, HL2
ИК диод
-------
2 шт
HL3, HL4
Светодиод
зеленый 3мм
---------
2 шт
КОНДЕНСАТОРЫ
C9
электролит
1000mk 6,3v
470mk 6,3v
1шт
C1, C7
электролит
4,7mk 10v
------
2шт
C2, C3, C4, C5, C6, C8
100n
150n
6шт
МИКРОСХЕМА
DA1, DA2
BA1604
LM567
2шт
ТРАНЗИСТОРЫ
FT1, FT2
Фото
транзистор
--------
2шт
VT1, VT2
BC337
KT3102
2шт
РАЗЪЕМЫ
XR8, XR9
PIN – 4 (папа)
------
2шт
XS8, XS9, XS5
PIN – 4 (мама)
---------
3шт
В качестве приемника отраженного сигнала служит фототранзистор FT1 и FТ2. Вместе с микросхемами они образуют усилитель импульсов. При появлении препятствия на выходе датчика – ноль, при отсутствии препятствия на выходе датчика – единица.
Принципиальная схема датчиков препятствий D1 – D2
Печатная и монтажная платы датчиков препятствий.
Для защиты от помех датчики HL1, FT1 и HL2, FT2, нужно поместить в металлический корпус, и закрыть фототранзисторы FT1 и FT2 темным стеклом.
Для изготовления платы блока датчиков препятствий по технологии ЛУТ, понадобится текстолит размером 60 x 35мм и 2 шт. 20 х 15мм.
2.6. Блок датчиков поверхности
На рисунке схема датчиков поверхности. Датчик построен на сдвоенном компараторе DA1 марки LM393. Резистором R3 и R7 настраивают порог срабатывания компаратора, а точность (яркость ик-диодов HL1-HL2) резисторами R1 и R5. На выходах 1 и 7 микросхемы DA1 при отсутствии пропасти (отраженный от пола сигнал) – единица, а когда есть пропасть (не отражается от пола сигнал) – ноль.
Список радиодеталей блока датчиков препятствий.
позиция
наименование
замена
количество
рисунок
РЕЗИСТОРЫ
R1, R2
100 om
120 om
2 шт
R4, R6
подстроечный
10k
4,7к
2 шт
R3, R5
10k
9,1к
2 шт
ДИОДЫ
HL3, HL4
ИК диод
-------
2 шт
КОНДЕНСАТОРЫ
C3
электролит
100mk 6,3v
220mk 6,3v
1шт
C1, C2,
100n
150n
2шт
МИКРОСХЕМА
DA1
LM393
--------
1шт
ТРАНЗИСТОРЫ
FT1, FT2
Фото
транзистор
---------
2шт
РАЗЪЕМЫ
XR1, XR2
PIN – 3 (папа)
---------
2шт
XS1, XS2, XS3
PIN – 3 (мама)
---------
3шт
Для изготовления платы блока датчиков поверхности по технологии ЛУТ, понадобится текстолит размером 55 x 25мм и 2 шт. 16 х 14мм.
Принципиальная схема датчиков поверхности.
Печатная и монтажная платы датчиков поверхности.
Корпус и шасси для робота
Корпус для робота изготовлен из жести способом пайки по чертежам (Приложение 3), а можно использовать любую детскую игрушку, учитывая, что механика должна быть построена по танковой схеме (два двигателя).
Шасси робота изготавливается из жести и состоит из двух независимых друг от друга редукторов. Передние и задние колеса робота вращаются с одинаковой скоростью благодаря промежуточным шестеренкам (паразиткам) от одного двигателя, получился полный привод. Шасси робота, построенное, по такой схеме позволяет роботу разворачиваться практически на месте. Можно в место колес использовать и гусеницы, тогда не нужно устанавливать промежуточные шестеренки. На рисунке показано примерное расположение колес, шестеренок и двигателя на раме редуктора.
Чертеж одной рамы редуктора показан в приложении 2. Вторая рама редуктора точно такая же.
Расположение элементов на редукторе робота.
Настройка робота
При включении робота выключателем S1 на выходах DD1 присутствуют: вывод 3- ноль, вывод 4- единица, вывод 11- ноль, вывод 10- единица. Робот движется вперед.
Предположим, препятствие было слева, отраженный ИК-сигнал принимает левый фотоприемник D1. В этом случае происходит быстрая зарядка конденсаторов С3 и С5. На входах D1.1 и D1.2 возникают уровни логического нуля, а на выходах будут единицы. В модуле драйвера транзисторы VT3, VT6, VT9, VT12 закрываются, но открываются VT4, VT, VT10, VT11 и полярность питания электродвигателей М1 и М2 меняется на обратную, робот отъезжает назад. Но, постоянная времени цепи R3-C3 больше чем R5-C5, поэтому, реверсивное движение колес, работающей от двигателя М2 прекращается раньше и включается прямое её движение, в то время, как вторая половина (М1) все еще движется в реверсивном направлении. В результате робот не только отъезжает назад, но и разворачивается направо. Затем, после разрядки С3 через R3 прямолинейное движение возобновляется (до встречи с другим препятствием).
Если на препятствие наталкивается фотоприемником D2, то все происходит точно так же, но работают цепи R4-C4 и R6-C6. В результате, робот так же отъезжает назад, но поворачивает теперь налево.
Приемники D5 и D6 можно бы и не устанавливать, но они нужны на случай, если робот отъезжая назад наткнется на препятствие, расположенное позади. В этом случае, на остаток времени реверсивного движения один или оба двигателя выключатся. Затем, включится прямолинейное движение
Если датчики D5 и D6 не установить, то упершись в препятствие, позади игрушка будет буксовать. В том случае, если игрушка наезжает на расположенное впереди препятствие и происходит срабатывание обеих фотодатчиков, в идеале, игрушка должна отъехать прямолинейно назад и ударится снова в это препятствие. Но, чтобы этого не происходило, нужно временные параметры цепей R3-C3 и R5-C5 установить немного разными. Тогда игрушка сначала отъезжает назад, а затем поворачивается в сторону датчика с большей задержкой. Направление обратного движения будет уже другим, и игрушка сможет обойти препятствие, либо толкнется в него одним датчиком и обойдет препятствие за несколько приемов. Резисторы R3, R4, R5, R6 выбраны одинаковыми, с их помощью нужно установить выдержки времени движения игрушки так, чтобы она оптимально обходила препятствия. Их параметры сильно зависят от скорости движения игрушки и подбираются экспериментально. Можно руководствоваться такими соотношениями, что постоянная времени R3-C3 должна быть примерно в два раза больше R5-C5, а постоянная времени R4-C4 примерно в два раза больше R6-C6, но постоянные времени R3-C3 и R5-C5 должны отличаться, примерно, на 20%.
Материалы, инструменты и оборудование
Для изготовления робота рекомендуется использовать следующий инструмент и материал:
Оцинкованную или черную жесть толщиной 0,5мм – 0,6мм, размером 210 х 300мм.
Пластмасса толщиной 3мм, размером 240 х 140мм.
4 колеса диаметром 40мм, шириной от 10мм до 25мм.
Набор шестеренок для 2 трехступенчатых редукторов подходящих размеров.
Трубка латунная для стоек и втулок, внутренний диаметр 3мм, длиной 220мм.
Болты и гайки диаметром 3мм различной длинны.
Пруток металлический диаметром 3мм, длиной 400мм.
Провода для монтажа сечением 0,5мм2, длиной примерно 250см.
Гетинакс фольгированный 2мм, размером 150 х 100мм.
Припой ПОС-60 с канифолью диаметром 3мм, длиной 100см.
Паяльная кислота 20мл.
Паяльник 100Вт 220в.
Паяльник 40Вт 220в.
Набор слесарного и монтажного инструмента.
Наждачная бумага №10, №40 размером 210 х 300мм.
Краска полиакриловая в баллончиках, грунтовка 1 баллон, черного цвета 1 баллон и желтого цвета 1 баллон.
Инфракрасные светодиоды использовали от пультов управления телевизоров. Фототранзисторы, ИК-диоды и разъемы с проводами применялись от принтеров «НР» и «SAMSUNG».
Микросхемы для датчиков покупались в магазине радиодеталей.
Заключение
Данная методическая разработка была апробирована в робототехническом объединении СЮТ. Собраны три мобильных робота и проведены соревнования «Гонки по линии».
Наглядность обучения и элементы соревновательного момента позволили получить качественные знания при изучении современных методов управления в робототехнике.
Источники информации
Литература:
Создание роботов в домашних условиях. Ньютон С. Брага., М., НТ. Пресс 2007.
500 схем для радиолюбителей. Электронные датчики. А.П. Кашкаров Наука и Техника. 2008.