Кейс: «Робот – манипулятор для сортировки деталей»
Кейс: «Робот – манипулятор для сортировки деталей»
АННОТАЦИЯ
учебной программе представлен вводный образовательный модуль (базовый модуль). Основная цель образовательного модуля - привлечь детей к исследовательской и изобретательской деятельности, показать им, что направление интересно и перспективно. Задача педагога - через вводный модуль развить у детей навыки, которые им потребуются в проектной работе и в дальнейшем освоении программы квантума.
На протяжении образовательного модуля обучающиеся работают с оборудованием (Hard skills) и приобрести навыки, которые важны как для участия в командных проектах, так и для жизни в социуме (Soft skills):
Вы уже знаете о суперспособностях современного учителя?
Тратить минимум сил на подготовку и проведение уроков.
Быстро и объективно проверять знания учащихся.
Сделать изучение нового материала максимально понятным.
Избавить себя от подбора заданий и их проверки после уроков.
Просмотр содержимого документа
«Кейс: «Робот – манипулятор для сортировки деталей»»
Кейс: «Робот – манипулятор для сортировки деталей»
Педагог по
направлению
робоквантум
Сергеев С.И.
Белгород 2017г.
РОБОКВАНТУМ
2017
СОДЕРЖАНИЕ
1. Аннотация3
2. Технические требования для выполнения кейсов4
3. Кейс №1: «Робот – манипулятор для сортировки деталей»7
5. Список литературы…..
2
РОБОКВАНТУМ
2017
АННОТАЦИЯ
учебной программе представлен вводный образовательный модуль (базовый модуль). Основная цель образовательного модуля - привлечь детей к исследовательской и изобретательской деятельности, показать им, что направление интересно и перспективно. Задача педагога - через вводный модуль развить у детей навыки, которые им потребуются в проектной работе и в дальнейшем освоении программы квантума.
На протяжении образовательного модуля обучающиеся работают с оборудованием (Hard skills) и приобрести навыки, которые важны как для участия в командных проектах, так и для жизни в социуме (Soft skills):
продолжительность одного занятия 1,5 астрономических часа;
частота занятий – 2 занятия в неделю;
количество преподавателей – 1;
количество обучающихся в группе – 14;
распределение комплектов оборудования и материалов – 1 комплект на 2 обучающихся.
ходе работы предлагается следующее распределение участников в группе:
участники работают все вместе в ходе обсуждения проблемной ситуации, рефлексии и подготовки к защите проекта;
участники работают в подгруппах по два человека в ходе сборки проекта по технологической карте, программирования микроконтроллерной платформы и выполнения самостоятельных заданий.
3
РОБОКВАНТУМ
2017
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ ДЛЯ ВЫПОЛНЕНИЯ КЕЙСА
Для успешного выполнения кейсов потребуется следующее оборудование, материалы, программное обеспечение и условия:
компьютер (ноутбук) на котором установлено следующие программное обеспечение: IDE Arduino, пакет офисных программ MS Office, cлайсер – программа для перевода 3D модели в управляющий код для 3D принтера;
3D-принтер;
компьютеры (ноутбуки) и смартфоны(планшеты) должны быть подключены к единой WiFi-сети с доступом в Интернет;
презентационное оборудование (проектор с экраном/телевизор с большим экраном) с возможностью подключения к компьютеру (ноутбуку) – 1 комплект;
маркерная доска, соответствующий набор письменных принадлежностей – 1 шт.;
каждый стол для работы над кейсом должен позволять разместить за одним компьютером (ноутбуком) двух обучающихся и предоставлять достаточно места для работы с компонентами создаваемого устройства;
плата Arduino;
набор Arduino;
сервопривод MG946R или MG955R – 3шт.;
сервопривод Towerpro SG90 9G – 1шт.;
гайка самостопорящаяся M6 – 1шт.;
винт M6x25 мм – 1шт.;
гайка самостопорящаяся M6 – 2шт.;
винт M3 x 20 – 2шт.;
винт с шестигранной головкой M3 x 10 – 1 шт.;
самозатягивающиеся гайки M4 – 9шт.;
винт M4 x 40 – 1шт.;
винт M4 x 30 – 1шт.;
винт M4 x 20 – 5шт.;
4
стержень с резьбой M4 x 60мм – 1шт.;
стержень с резьбой M4 x 32мм – 1шт.;
шарики стальные диаметр 6мм – 25шт.;
подшипник 606ZZ – 1шт.;
несколько шайб M4;
5
РОБОКВАНТУМ
2017
КЕЙС: «Робот – манипулятор для сортировки деталей»
Количество часов/занятий: 20/10
Hard Skills:конструирование,программирование
Soft Skills: командная работа,умение высказывать свою точку зрения, умение генерировать идеи, алгоритмическое мышление, проведение презентаций
7
РОБОКВАНТУМ
2017
Проблемная задача
Александр занимается в робоквантуме. У него получается проектировать, конструировать даже программировать, но сборка и сортировка деталей после занятия занимает не мало времени. Что же делать? Помочь в этом деле ему предложил его напарник Дима с которым они вместе уже работали над несколькими проектами. Дмитрий рассказал Саше про промышленные манипуляторы, которые он видел на экскурсии на автомобильном заводе, умеющие перемещать детали. Александру сразу пришла идея, а не сделать ли нам в Робоквантуме такой же манипулятор, который смог бы сам распознавать делали, тем самым помог бы решить проблему сортировки. Как вы считаете сможем ли мы помочь юным робототехникам, собрав устройство сортировки деталей?
Место модуля в образовательной программе
Базовый модуль
Межпредметные связи
Естественные науки. Физика.
Механика. Мехатронные системы.
Свойства материалов.
Электроника.
Математика
Математическая логика. Массивы данных и операции с ними.
Информатика и программирование
Системы автоматического управления. Устройства с обратной связью.
8
РОБОКВАНТУМ
2017
Естественные науки
Измерение расстояния
Сила трения
Механизмы, облегчающие работу
Зубчатые передачи
Свойства материалов
Методы исследования.
Информатика и программирование
Составление алгоритма программы
Написание кода программы согласно алгоритму.
Электроника
Программирование микроконтроллерных платформ
Изучение особенностей использования различных датчиков
Анализ
Проектирование
Программирование
Тестирование
Понятия
Серводвигатель
Микроконтроллерная платформа
Датчик цвета
3D-моделирование
Переменная, тип переменной
Задержка в выполнении программы
РОБОКВАНТУМ
2017
Ход занятия
Соберите устройство, включая электронную часть используя технологическую карту;
напишите управляющую программу для манипулятора;
Проверьте работоспособность устройства: устройство должно правильно реагировать, захватывать и сортировать детали по цветам;
Убедитесь, что устройство работает без сбоев: добейтесь, чтобы в ходе его работы датчики и сервоприводы правильно срабатывали.
Рефлексия
Какие сложности возникли во время сборки конструкции? Как вы с ними справились? Что по вашему мнению, можно сделать, чтобы избежать их?
Какие дополнительные признаки объектов и предметов можно определять при отсортировке. Предложите свое техническое решение.
Что можно изменить, чтобы сделать срабатывания системы более осмысленными?
Можно ли собрать устройство без использованияконтроллера? Обоснуйте ответ.
Развитие
Модифицируйте программу таким образом, чтобы устройство вело подсчет отсортированных деталей
Появились новые идеи? Хотите доработать своюмодель? Изменить программу? Что для этого потребуется? Каких знаний не хватает?
РОБОКВАНТУМ
2017
Технологическая карта №1
№ п/п
Схема сборки манипулятора
Описание
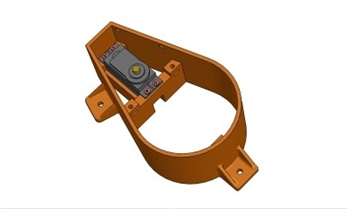
1.
Установите сервопривод MG946R таким образом
2.
Прикрепите сервопривод к основанию с помощью саморезов
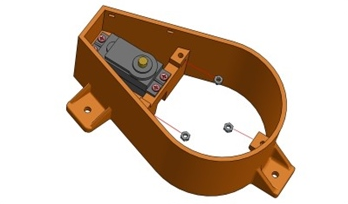
3.
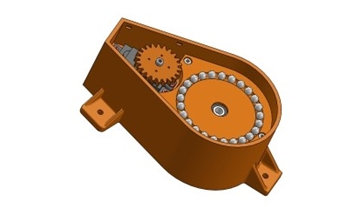
Вставьте 3 гайки M3 в пазы главного основания, как показано на рисунке
4.
Вставьте подшибник 606ZZ в корпус и прикрепите пластину к основанию, используя 3 винта M3
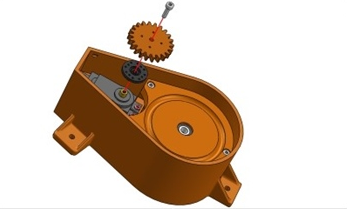
5.
Проверьте свободно ли движется подшипника
6.
Расположите приводную пластину и ведущую шестерню на шлицевом валу, закрутите один саморез для соединения пластины и шестерни
7.
В результате должно выглядеть так как на рисунке
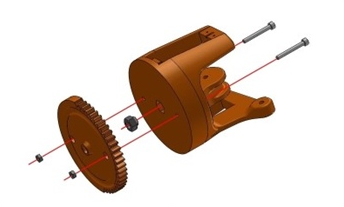
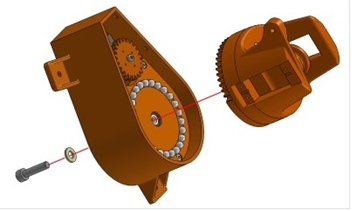
8.
Вставьте самостопорящуюся гайку M6 в гнездо поворотного основания, затем совместите детали и зафиксируйте их с помощью нескольких винтов M3 и гаек, как показано на рисунке
9.
Используйте 25 шариков диаметром 6 мм для заполнения углубления
10.
Соедините два элемента с помощью винта M6
11.
Теперь базовый элемент манипулятора готов
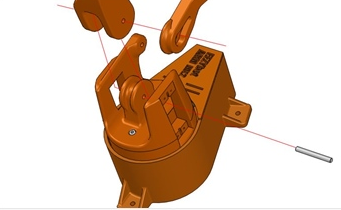
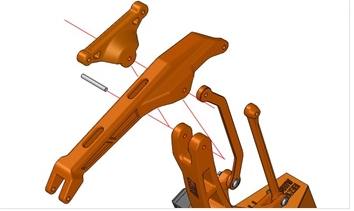
12.
Вставьте в таком положении главный и приводной рычаг, соединив их стержень M4 х 32мм
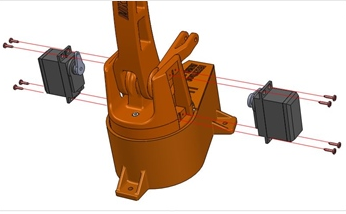
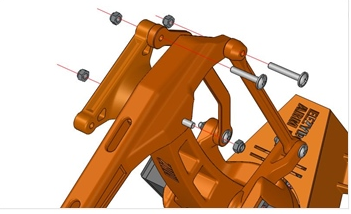
13.
Закрепите два сервопривода и удерживайте их, используя восемь саморезов. Для управления механизмом используйте рожки.
Убедитесь, что среднее положение сервоприводов выровнено с корпусом кронштейнов
14.
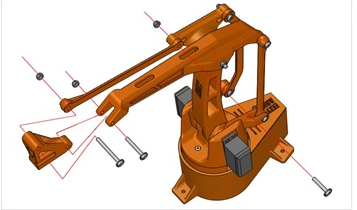
Соедините нижний конец прямого рычага с ведущим рычагом
15.
Соедините нижний конец углового рычага и неподвижное основание
16.
Используя короткий стержень M4 соедините детали как показано на рисунке
17.
Соедините стержень к основному плечу и поверните его под углом к треугольнику
18.
Прикрепите стержень и коготь быстро к передней части горизонтального рычага
19.
В результате должно получается как рисунке
20.
Соберите рабочий орган как показано на изображении
21.
Соедините рабочий орган к разъёму манипулятора
22.
Теперь манипулятор собран и готов для программирования
РОБОКВАНТУМ
2017
СПИСОК ЛИТЕРАТУРЫ
Филиппов С.А. «Робототехника для детей и родителей», 2010 г.