Разработка, создание и программирование автономного робота- помощника человека.
Создайте Ваш сайт учителя Видеоуроки Олимпиады Вебинары для учителей
Проектно-исследовательская работа "Робот - помощник"
Вы уже знаете о суперспособностях современного учителя?

Тратить минимум сил на подготовку и проведение уроков.

Быстро и объективно проверять знания учащихся.

Сделать изучение нового материала максимально понятным.

Избавить себя от подбора заданий и их проверки после уроков.

Наладить дисциплину на своих уроках.

Получить возможность работать творчески.
Просмотр содержимого документа
«Проектно-исследовательская работа "Робот - помощник"»

Проект: «Garbage collection»
Авторы проекта: Сабитов Дмитрий, 7 класс, СОШ №3,
Мартемьянов Максим, 7 класс, СОШ №3
Руководитель: Владимирова Вероника Сергеевна
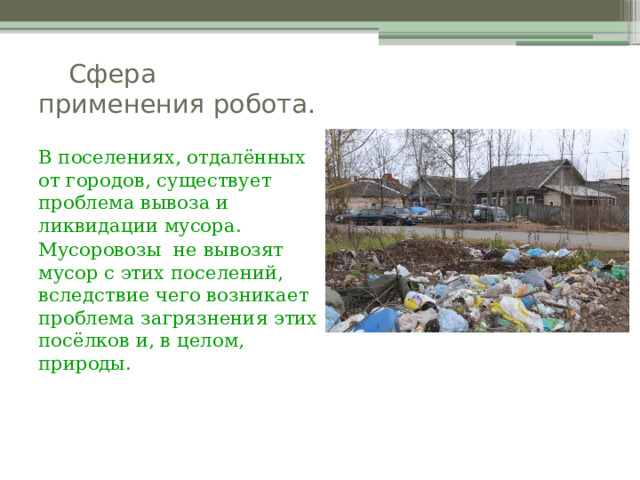
Сфера применения робота.
В поселениях, отдалённых от городов, существует проблема вывоза и ликвидации мусора.
Мусоровозы не вывозят мусор с этих поселений, вследствие чего возникает проблема загрязнения этих посёлков и, в целом, природы.
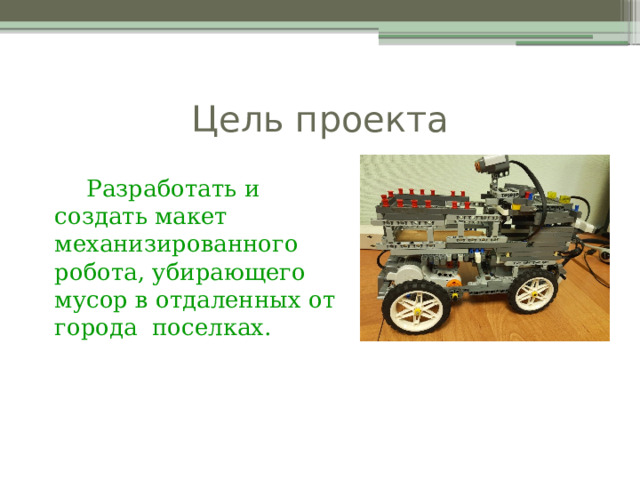
Цель проекта
Разработать и создать макет механизированного робота, убирающего мусор в отдаленных от города поселках.
Задачи:
- Изучить проблему загрязнения окружающей среды в отдаленных поселках и деревнях.
- Разработать проект робота, собирающего мусор у домов населенных пунктах.
- Собрать модель робота с помощью конструктора Lego mindstorms nxt
- Составить и протестировать программу для собранной конструкции.
Инженерное решение
Для вывоза мусора в отдалённых посёлках был придуман автоматизированный робот, который в заданное время объезжает улицы поселка, ожидает погрузки мусора и увозит его на переработку.
Электронные компоненты
При построении модели были выбраны следующие электронные компоненты:
Микроконтоллер NXT.
Осуществляет взаимодействие и работу всех подключенных узлов.
Серводвигатель А.
Движение правой стороны робота. Движение модели
Серводвигатель B.
Движение левой стороны робота. Движение модели
Датчики цвета и света.
Движение по линии и распознавание остановок
Датчик движения 1.
Определение препятствий перед роботом
Остановка перед препятствием
Датчик движения 2.
Определение есть ли в кузове робота мусор
Движение только если в кузове находится мусор
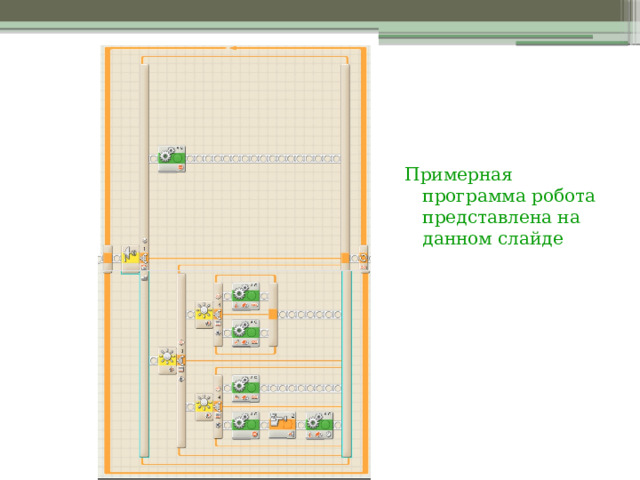
Примерная программа робота представлена на данном слайде
Алгоритм работы модели
Программа начинается с проверки препятствия перед роботом. Если препятствия нет, то робот начинает движение по линии до тех пор, пока не увидит метку – перекресток (дом). После этого робот останавливается и ожидает погрузку. Наличие или отсутствие погрузки робот проверяет по датчику. Если мусор загружен, робот продолжает движение до следующей метки – перекрестка. Если метки закончились, то робот уезжает на мусороперерабатывающий завод.
Результат проекта
Поставленная цель в результате работы была выполнена.
Аналогов данного механизированного робота не существует, соответственно мы считаем, что данная модель робота является актуальной и уникальной в своём роде.
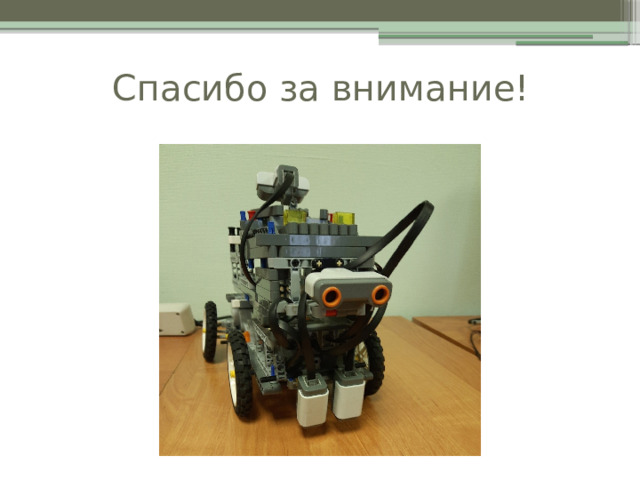
Спасибо за внимание!







Полезное для учителя




Распродажа видеоуроков!

1660 руб.
2560 руб.

1600 руб.
2460 руб.

1900 руб.
2920 руб.

2040 руб.
3140 руб.
ПОЛУЧИТЕ СВИДЕТЕЛЬСТВО МГНОВЕННО

* Свидетельство о публикации выдается БЕСПЛАТНО, СРАЗУ же после добавления Вами Вашей работы на сайт
Удобный поиск материалов для учителей
Проверка свидетельства