Проект позволяет сконструировать модель робота для соревнования «Интеллектуальное сумо» путем устранения недостатков набора MINDSTORMS EDUCATION NXT с помощью конструкторской доработки.
Создайте Ваш сайт учителя Видеоуроки Олимпиады Вебинары для учителей
Модель робота для соревнования «Интеллектуальное сумо». Устранение недостатков набора MINDSTORMS EDUCATION NXT путём конструкторской доработки.
Вы уже знаете о суперспособностях современного учителя?

Тратить минимум сил на подготовку и проведение уроков.

Быстро и объективно проверять знания учащихся.

Сделать изучение нового материала максимально понятным.

Избавить себя от подбора заданий и их проверки после уроков.

Наладить дисциплину на своих уроках.

Получить возможность работать творчески.
Просмотр содержимого документа
«печатная работа»
Модель робота для соревнования «Интеллектуальное сумо». Устранение недостатков набора MINDSTORMS EDUCATION NXT путём конструкторской доработки.
Шабанов Даниил Сергеевич
МБОУ ДО «Подпорожский центр детского творчества»
Научный руководитель:
Владимирова Вероника Сергеевна
Механическая передача — механизм, служащий для передачи и преобразования механической энергии от энергетической машины до исполнительного механизма (органа) одного или более, как правило, с изменением характера движения (изменения направления, сил, моментов и скоростей). Как правило, используется передача вращательного движения
Зýбчатая переда́ча — это механизм или часть механизма механической передачи, в состав которого входят зубчатые колёса.
Назначение:
передача вращательного движения между валами, которые могут иметь параллельные, пересекающиеся и скрещивающиеся оси.
преобразование вращательного движения в поступательное, и наоборот.
При этом усилие от одного элемента к другому передаётся с помощью зубьев.
Основным назначением зубчатой передачи данной модели является уменьшение физических усилий при выполнении работы (редуктор).

Актуальность моего проекта состоит в том что я из несовершенного набора Lego собрал модель которая с помощью конструкционных решений побеждает более совершенные наборы.
Первый этап моей работы начался поиском решения проблемы с недостатком портов в блоке NXT. Мне нужно было подключить 4 мотора, а в 1-ом блоке всего 3 порта. Поэтому мне пришлось взять 2 блока , но соответственно пришлось удвоить количество датчиков и написать 2 программы. Из-за того, что я поставил блоки зеркально друг другу один порт для загрузки программ оказался снизу, а другой с верху. С портом который находился с верху проблем не возникло. А порт оказавшийся снизу был в недосягаемости, поэтому я сделал откидным левый мотор. Следующая проблема заключалась в том, что из-за большой массы блоков робот проседал в центре. К счастью проблема решилась легко. В процессе укрепления робота я под днищем поставил несколько поперечных балок. Затем встал вопрос какой сделать лобовую часть робота. Я решил собрать спереди отвал который в последствии был укреплён металлической пластиной.
Отдельное внимание заслуживает конструкция действующих редукторов для усиления моторов, с соотношением 2/1. Обычно, это объёмная конструкция, но в нашем случае, она была сделана максимально компактной.
Потом был процесс программирования во время этого процесса, я заметил что при движении вперёд робот меняет свою траекторию. Как выяснилось это происходило из-за неправильного подключения двигателей к блоку. У меня было два варианта подключения: первый подключить левые 2 мотора к левому блоку соответственно правые два мотора к правому блоку; вторым вариантом было подключение двух передних моторов к левому блоку, а двух задних к правому блоку. Экспериментальным путём я выяснил что правильным был второй вариант. Смещение происходило по причине несовершенства блоков, моторы были подключены по первой схеме и когда поступал сигнал от датчиков сигнал на моторы подавался через разные промежутки времени и угол под которым должен был ехать робот менялся. Со второй схемой такой проблемы не было.


В этом состязании участникам необходимо подготовить автономного робота, способного наиболее эффективно выталкивать робота-противника за пределы черной линии ринга.
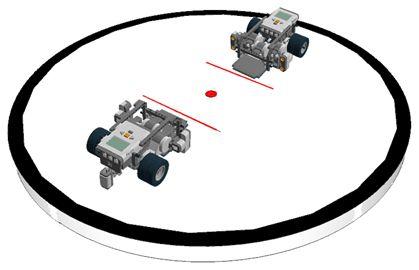
1. Условия состязания
1.1. Состязание проходит между двумя роботами. Цель состязания - вытолкнуть робота-противника за черную линию ринга.
1.2. После начала состязания роботы могут маневрировать по рингу как угодно.
1.3. Если любая часть робота касается поверхности вне подиума (за пределами черной линии), роботу засчитывается проигрыш в раунде.
1.4. Если по окончании раунда ни один робот не будет вытолкнут за пределы круга, то выигравшим раунд считается робот, находящийся ближе всего к центру круга.
1.5. Если победитель не может быть определен способами, описанными выше, решение о победе или переигровке принимает судья состязания.
1.6. Во время раунда участники команд не должны касаться роботов.
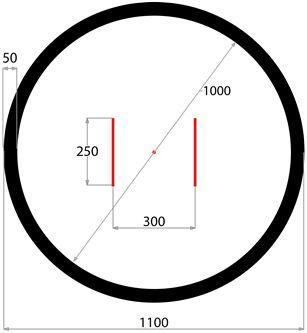
2. Поле
2.1. Белый круг диаметром 1 м с чёрной каёмкой толщиной в 5 см.
2.2. В круге красными полосками отмечены стартовые зоны роботов.
2.3. Красной точкой отмечен центр круга.
2.4. В соревнованиях используется поле в виде подиума высотой 10-20 мм. Поле располагается на ровной горизонтальной поверхности. Размер поверхности (основания) должен быть достаточным для исключения случайного падения роботов с высоты. Допускается расположить поле непосредственно на полу.
2.5 Поле изготавливается из твёрдого шероховатого материала, обеспечивающего достаточное качество сцепления резиновых покрышек колёс и гусениц с поверхностью (из ламинированной ДСП, листового пластика и т.п.). Линии могут быть выполнены как из самоклеящегося листового материала (плёнки), так и с помощью краски, устойчивой к истиранию.
Используемая литература
Бабич, А. В. Промышленная робототехника / А.В. Бабич. - М.: Книга по Требованию, 2012. - 263 c.
2. Барсуков, А.П. Кто есть кто в робототехнике / А.П. Барсуков. - М.: Книга по Требованию, 2010. - 128 c.
3. Иванов, А. А. Основы робототехники / А.А. Иванов. - М.: Форум, 2012. - 224 c.
4. Копосов, Д. Г. Первый шаг в робототехнику. 5-6 классы. Практикум / Д.Г. Копосов. - М.: Бином. Лаборатория знаний, 2014. - 292 c.
5. Копосов, Д. Г. Первый шаг в робототехнику. Практикум для 5-6 классов / Д.Г. Копосов. - М.: Бином. Лаборатория знаний, 2012. - 292 c.
6. Костров, Б. В. Искусственный интеллект и робототехника / Б.В. Костров, В.Н. Ручкин, В.А. Фулин. - М.: Диалог-Мифи, 2008. - 224 c.
7. Макаров, И. М. Робототехника. История и перспективы / И.М. Макаров, Ю.И. Топчеев. - М.: Наука, МАИ, 2003. - 352 c.
8. Предко, М. 123 эксперимента по робототехнике / М. Предко. - М.: НТ Пресс, 2006. - 544 c.
9. Филиппов, С. А. Робототехника для детей и родителей / С.А. Филиппов. - Л.: Наука, 2013. - 320 c.
Интернет ресурсы
http://alnam.ru/book_e_phis.php?id=151 научная библиотека
https://hi-tech.mail.ru/news/plasma-sun/imageset/1174661/
5







Полезное для учителя




Распродажа видеоуроков!

1670 руб.
2780 руб.

1720 руб.
2860 руб.

1670 руб.
2780 руб.

1480 руб.
2470 руб.
ПОЛУЧИТЕ СВИДЕТЕЛЬСТВО МГНОВЕННО

* Свидетельство о публикации выдается БЕСПЛАТНО, СРАЗУ же после добавления Вами Вашей работы на сайт
Удобный поиск материалов для учителей
Проверка свидетельства