Kvadrat tenglamalarni formulalar yordamida yechish
Создайте Ваш сайт учителя Видеоуроки Олимпиады Вебинары для учителей
Kvadrat tenglamalarni formulalar yordamida yechish
Вы уже знаете о суперспособностях современного учителя?

Тратить минимум сил на подготовку и проведение уроков.

Быстро и объективно проверять знания учащихся.

Сделать изучение нового материала максимально понятным.

Избавить себя от подбора заданий и их проверки после уроков.

Наладить дисциплину на своих уроках.

Получить возможность работать творчески.
Просмотр содержимого документа
«Kvadrat tenglamalarni formulalar yordamida yechish»
TЕKIS KI N Е M A TIK A S I
M avzu:
M Е XAN I Z M L A R
- Kinematikani o`rganish usullari.
- Mexanizmlarni turli xolatlardagi
R еja
planlarini chizish
3. Tekis nuqt a l a r i n i n g planlari
b o ’ g ’ i n t ez l a n i sh
m e xa n i zm tezlik va
4 . K i ne m a t i k
diagrammalar
y o rd a m i da o`rganish.
mexanizmlar harakatini
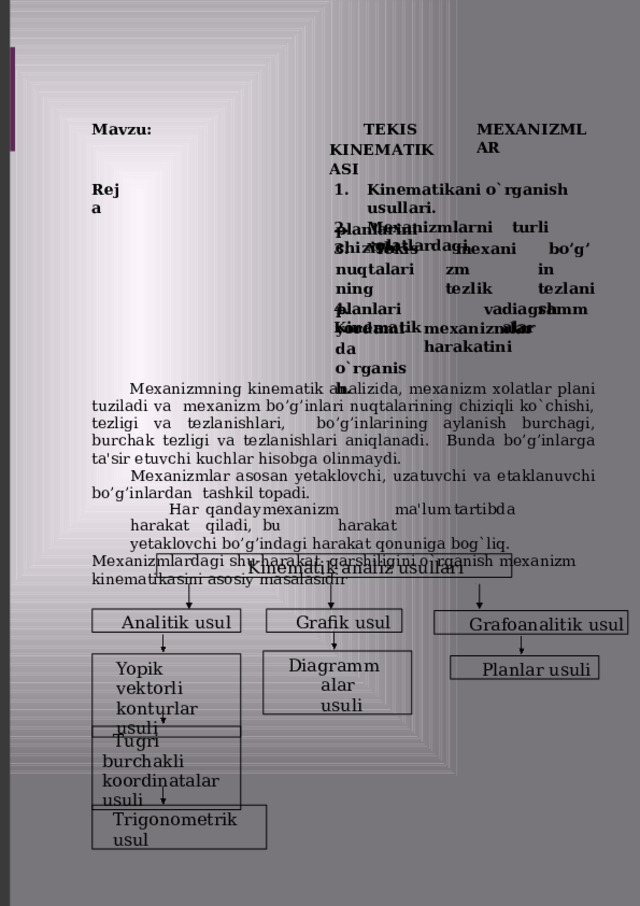
Mexanizmning kinematik analizida, mexanizm xolatlar plani tuziladi va mexanizm bo’g’inlari nuqtalarining chiziqli ko`chishi, tezligi va tezlanishlari, bo’g’inlarining aylanish burchagi, burchak tezligi va tezlanishlari aniqlanadi. Bunda bo’g’inlarga ta'sir etuvchi kuchlar hisobga olinmaydi.
Mexanizmlar asosan yetaklovchi, uzatuvchi va etaklanuvchi bo’g’inlardan tashkil topadi.
Har qanday mexanizm ma'lum tartibda harakat qiladi, bu harakat
yetaklovchi bo’g’indagi harakat qonuniga bog`liq. Mexanizmlardagi shu harakat qarshiligini o`rganish mexanizm kinematikasini asosiy masalasidir
Kinеmatik analiz usullari
Analitik usul
Grafik usul
Grafoanalitik usul
Diag r a m m a l ar usuli
Yopik vеktorli konturlar usuli
Planlar usuli
Tugri burchakli koordinatalar usuli
Trigonomеtrik usul
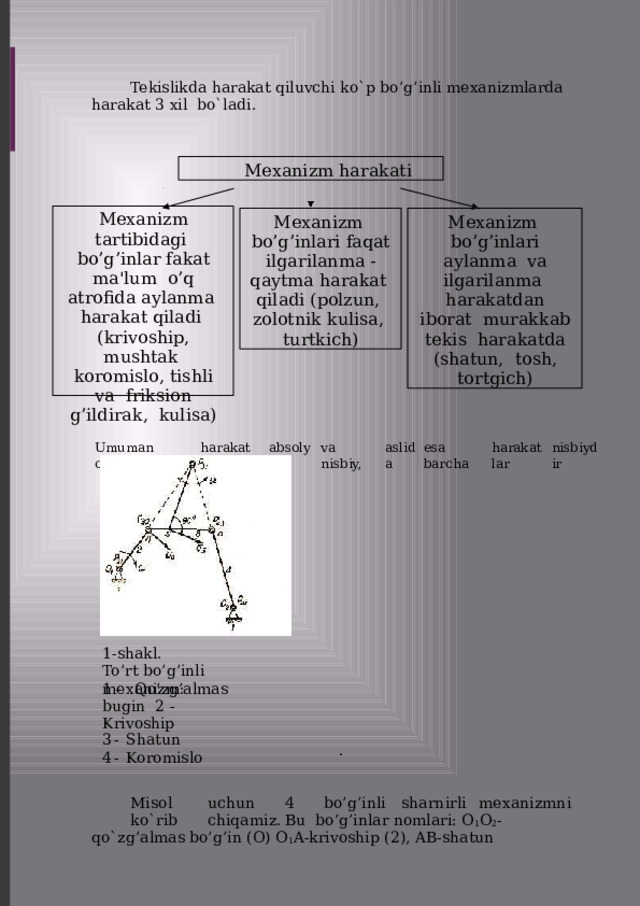
Tekislikda harakat qiluvchi ko`p bo’g’inli mexanizmlarda harakat 3 xil bo`ladi.
Mеxanizm harakati
Mеxanizm tartibidagi bo’g’inlar fakat ma'lum o’q atrofida aylanma harakat qiladi (krivoship, mushtak koromislo, tishli va friksion g’ildirak, kulisa)
Mеxanizm bo’g’inlari aylanma va ilgarilanma harakatdan iborat murakkab tеkis harakatda (shatun, tosh, tortgich)
Mеxanizm bo’g’inlari faqat ilgarilanma - qaytma harakat qiladi (polzun, zolotnik kulisa, turtkich)
nisbiydir
harakatlar
esa barcha
harakatlar
a slida
va nisbiy,
a bso l y ut
Umuman olganda
1-shakl.
To’rt bo’g’inli mеxanizm:
1 - Qo’zg’almas bugin 2 - Krivoship
- - Shatun
- - Koromislo
.
M i so l u c hu n 4 bo ’ g ’ inl i s h a r n i r l i m e x a ni z m n i ko ` r i b ch iq a m i z. B u bo’g’inlar nomlari: O 1 O 2 -qo`zg’almas bo’g’in (O) O 1 A-krivoship (2), AB-shatun
(3) O 2 B-koromislo(4).
K r i v o sh i pn i o ni y a y l a ni s h m ar k azi O 1 n u q t a d a y ot ad i , u n i b i l a n
R 2 1
belgilaymiz va absolyut oniy markaz deymiz. Shunga o`xshash 4-bo’g’inli absolyut oniy aylanish markazi O 2 nuqta bo`lib, uni R 41 deb belgilaymiz.
Bu erda 2-chi va 4-chi bo’g’inlar qo`zg’almas bo’g’in 1 ga nisbatan
harakatlanmoqda. 3-chi bo’g’inning 2-chi bo’g’inga nisbatan oniy aylanish markazi A nuqtada bo`ladi, bu markaz nisbiy harakatdagi oniy aylanish markazi bo`ladi (R 32 ) 4-chi bo’g’inli koromisloning 3-chi bo’g’in shatunga nisbatan oniy aylanish markazi B nuqtada bo`ladi uni R 43 orqali belgilaymiz. Nazariy mexanika kursidan foydalanib AB-bo’g’inning R 31 oniy aylanish markazini hosil qilamiz.
Me x an i zm bo ’ g ’ in l ar i n in g a bs ol y u t o n i y a y l a n is h m ar k a z i qo`zg`almasdir, nisbiysi esa bo’g’in xolatiga qarab o`zgaradi.
oniy markaz atrofida
S h a k l d a k o ` rs at i l g a n A B bo ’ g ’ i n n in g aylanishidagi oniy burchak tezligi.
R 3 1
v A v B
c 1 bo`ladi.
ω =
3
AP BP
31 31
AB bo’g’inning ixtiyoriy S nuqtasidagi tezligi esa
v S = ω 31 · P 31 S м / с bo`ladi.
bu erda:
P 31 S – P 31 oniy aylanish markazidan S nuqtagacha bo`lgan masofa.
2. Mexanizmlarning turli xolatlardagi planlarni tuzish.
Mexanizm bo’g’inlarini kattalashtirib yoki kichaytirib chizish uchun ma'lum masshtab talab qilinadi. Quyidagi shakl – 5.2 da aksial krivoshipli – shatunli mexanizmni ko`rib chiqsak.
Bu mexanizm bo’g’inlarini o`lchovlari quyidagicha
L OA = 95 mm = 0,095 m—krivoshipning xaqiqiy uzunligi L AB = 0,340 m—shatunning xaqiqiy uzunligi
L АS =100 mm = 0,1m—shatun og’irlik markazi S va A nuqta orasidagi masofa.

.
2-Shakl – Krivoshipli shatunli mеxanizm
Mexanizm bo’g’inlarini uzunlik masshtabi L bo`yicha shakldagidek chizamiz.
Uzunlik masshtabi quyidagicha topiladi.
AB
=
l
;
A B
Bu erda AB – shatunning grafik uzunligini , (buni shu kesma chiziladigan qog`oz o`lchamiga qarab tanlaymiz). Bizda AB = 68mm., u xolda
0.34
= 0.005
l
l
yoki = 0,005 м
мм
68
Buni AB kesmaning xar 1mm uzunligiga 5 mm xaqiqiy uzunlik bor deb tushunamiz. Shunga ko`ra krivoshipning grafik uzunligi, ya'ni qog`ozga chiziladigan uzunligi quyidagicha bo`ladi.
l OA
OA =
0.095 19 мм
l 0 .005
Mexanizmni boshlang`ich (nol) vaziyati quyidagicha topiladi.
L = OA + AB = 19mm + 68 mm = 0,087m.
Demak mexanizm krivoshipning aylanish markazi (0) dan o`ng tamonga L = 87mm uzunlikdagi radius bilan yoy chizib XX o`qi bilan kesishuv nuktasida B o nuqtani belgilaymiz va boshlang`ich OA 0 B 0 (nol) vaziyat topiladi. Qolgan nuqtalarni shunga o`xshash qilib belgilaymiz.
3. Tekislikda aylanuvchi mexanizmlar bo’g’in nuqtalarining tezlik va tezlanishlarini topish.
Bu masalaning yechimini krivoship-polzunli mexanizm misolida k o’r ib chiqamiz. Masalaning berilgan qi ymati mexanizmning geometrik parametrlari hi soblanib, u l knematik sxemasi qu rilgan (3-rasm) va uning kirish kinematik parametri 1 qo’zg’a lmas o’z garmas burchak tezlikka egadir. Krivoship B nuqtasining chiziqli tezligi ma’lum formuladan topish mumkin.
v B AB 1
( 3 . 2 )
Bu tezlik vektori istalgan tezlik masshtablarda qu rilgan tezlik rejasidir.
Tezlik masshtabi
м
v
(3.3)
v
v с мм
bu yerda: v – xa qiqi y chiziqli tezlik m/s da ;
v – bu tezlik vektorining chizmadagi ifodasi mm da .
Q urilishni va hi soblashni yengillashtirish maqsadida tezlik masshtabini istalganicha olmasdan, uni krivoship B nuqtasining tezlik vektorini chizmadagi ifodasini mexanizm sxemasidagi krivoship uzunligiga teng qi lib olinsa maqsadga muvofiq b o’l adi., ya’ni v = AB . Unda (3.2) ni hi sobga olganda tezlik masshtabi:
v A B
v
B 1
v
AB
B
(3.1) ni xisobga olib, qu yidagini ho sil qi lamiz:
м
(3.4)
v l 1
с мм
Bu ho latda aylanuvchi zveno nuqtasining chizmadagi ifodasi zvenodagi bu nuqtaning radius-vektorining joylashuv ifodasiga teng b o’l sa, bunday tezlik masshtabini bosh zveno masshtabi krivoship masshtabi deyiladi. Tezliklar rejasini k o’r satilgan masshtabda qu ramiz (5.3-rasm). Q utb p dan krivoship B nuqtaning tezlik vektorini, uning burchak tezligi yo’nalishiga mos ravishda o’tqa zamiz. Bu vektor yu qo rida aytilganidek mexanizm sxemasidagi krivoship
pb AB . SHatunga o’t amiz. B nuqta
uzunligiga teng va perpendikulyar b o’l adi, ya’ni
krivoshipga tegishli b o’l masdan shatunga ha m tegishlidir, shuning uchun shatundagi B nuqtaning tezligi, krivoshipdagi V nuqtaning tezligi ha mdir. V nuqtaning kinematik parametrlari bir xil. SHatun tekislikda murakkab ha rakalanadi, ya’ni, uning ha rakati B nuqtaning ko’chirma, ilgarilanma va B nuqta atrofida aylanma ha rakatidan iborat. SHatundagi C nuqtaning tezligini aniqlash uchun qu yidagi vektor tenglamani yechish kerak:
v C v B v CB
(3.5)
C nuqta shatunga tegishli b o’l ish bilan birga polzunga ha m tegishli, shuning uchun ularning tezligi bir xildir. Polzun yo’naltiruvchi b o’l ib, ilgarilanma ha rakatlanadi, shu sababli B nuqtaning tezlik ta’sir chizi g’i gorizontal yo’nalgan b o’l adi. Bu tezlik absolyut, shu sababli qu tb p dan gorizontal o’tqa zamiz. V CB nisbiy tezlik shatunga perpendikulyar, u nisbiy ha rakatda B nuqta atrofida aylanadi. SHuning uchun (3.5) vektor tenglamaga asosan grafik qo’ shishni bajarib, tezliklar rejasidagi B nuqtadan shatunga perpendikulyar o’tqa zamiz. Bu
pc – bu S
ikki chiziqni uchrashish nuqtasida qa ralayotgan nuqta topiladi. SHunday qi lib,
nuqtaning absolyut tezlik vektori, bc esa B nuqtaning C nuqtaga nisbatan nisbiy tezlik vektori. Tezliklar rejasida C nuqtani topish uchun o’x shashlik teoremasidan foydalanamiz, bunga asosan, zvenodagi nuqtalarning nisbiy tezlik vektorlaridan qu rilgan figura zvenolaridan qu rilgan figuraga o’x shash b o’l ishi kerak. Bunda zveno kesmalari va nisbiy tezliklar proportsionaldir. Agar C nuqta BC shatunning o’r tasida joylashgan b o’l sa, u ho lda tezliklar rejasida C nuqta BC nuqtalarning o’r tasida topiladi: ps – S nuqtaning absolyut tezlik vektori.
K o’r ilgan tezliklar rejasi yordamida mexanizmga tegishli zveno va nuqtalarning tezlik qi ymat va yo’nalishi tezlik yo’nalishidan ko’r inib turadi, uning qi ymatini mm larda olingan vektor uzunligini tezlik masshtabiga ko’paytirib topiladi. Masalan, C nuqtaning tezligi (yoki polzunning tezligi):
v C pc l (m/s)
SHatunning burchak tezligini topamiz. SHatun tekislikda murakkab ha rakatlanadi, ha r bir vaqt momentida markazdagi aylanma ha rakat yoki B nuqta atrofidagi nisbiy ha rakatga b o’l ish mumkin. Bu tezlik mexanizm sxemasi va tezliklar rejasi yordamida aniqlanadi. Ya’ni shatunning nisbiy tezligini shatun nisbiy tezligiga b o’l ib topiladi:
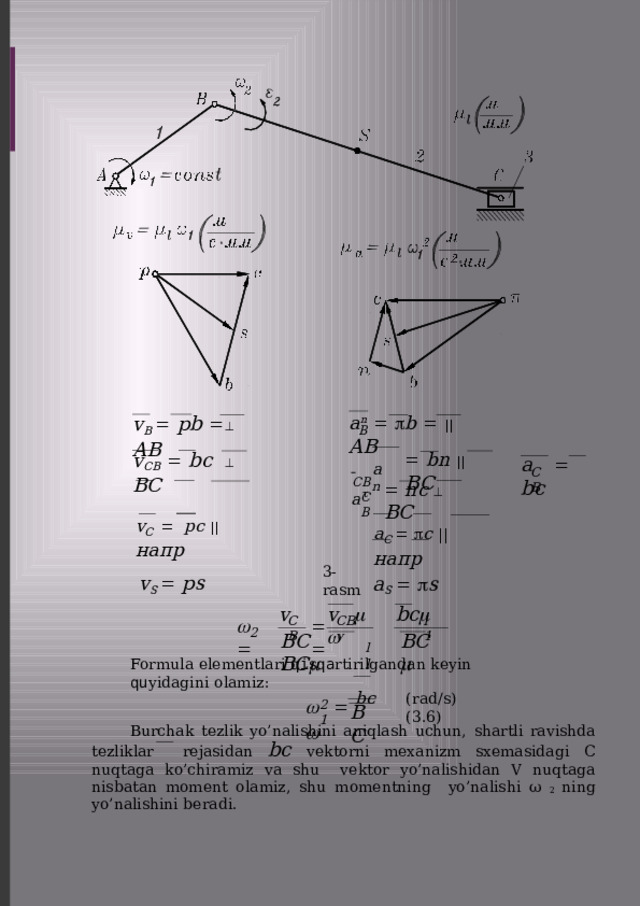
v B pb AB
a n b || AB
B
a n
v CB bc BC
v C pc || напр
v S ps
bn || BC
a bc
CB
CB
a
nc BC
CB
a C c || напр
a S s
3 -r a sm
v
v bc
CB
l 1
CB v
2
B C
BC B C
l l
Formula elementlari qi s qa rtirilgandan keyin qu yidagini olamiz:
bc
(ra d / s) ( 3 . 6 )
2 1
BC
Burchak tezlik yo’nalishini aniqlash uchun, shartli ravishda tezliklar rejasidan bc vektorni mexanizm sxemasidagi C nuqtaga ko’chiramiz va shu vektor yo’nalishidan V nuqtaga nisbatan moment olamiz, shu momentning yo’nalishi ω 2 ning yo’nalishini beradi.
Zveno va nuqtaning tezlanishini aniqlash
Tezliklar mexanizmda tezlik rejasi yordamida topilsa, tezlanishlar mexanizmida tezlanishlar rejasi yordamida topiladi. Tezlanish rejasi – bu nuqtaning absolyut va nisbiy tezlanish vektoridan qu rilgan ko’pburchakdir. Tezlanishlarini topish uchun berilganlar mexanizmning kinematik sxemasi va tezliklar rejasi. Krivoshipning burchak tezligi o’z garmas b o’l ganligi sababli, uning ha r bir nuqtasi normal (markazga intilma) tezlanishga, qi ymati esa qu yidagi formuladan topiladi:
a n AB 2
( 3 . 7 )
B 1
Istalgan tezlanish masshtabida k o’r satilgan, bu tezlanish vektori, tezlanish rejasini qu rish uchun berilgandir. Tezlanish masshtabi:
м
a
( 3 . 8 )
a
2
a
с мм
bu yerda a – haqiqi y chiziqli tezlanish m/s 2 da;
a – bu tezlanish vektorining chizmadagi ifodasi mm da.
T ez li k l ar re ja s i n i qu r i s h n i o so n l as ht i r il g a ni d e k , b u m ass h t a b n i ha m ixtiyoriy olmasdan, uni krivoship V nuqtasining tezlanish vektorini mexanizm
sxemasidagi krivoship uzunligiga teng qi lib olinsa, ya’ni a = AB , unda tezlanishning masshtabi (3.7) hi sobga olgan ho lda qu yidagicha b o’l adi:
a A B
a
2
B 1
B
a
AB
(3.1)ni hi sobga olib, ho sil qi lamiz:
м
2
( 3 . 9 )
a l 1
2
с мм
Bu ho latda aylanuvchi zveno nuqtasi normal tezlanishning chizmadagi ifodasi zvenodagi bu nuqtaning radius-vektorining joylashuv ifodasiga teng b o’l sa, bunday tezlanish masshtabini bosh zveno masshtabi yoki krivoship masshtabi deyiladi.
T ez l a n i s h l ar re j a si n i k o’r s a t i l g a n m ass h t a b d a qu ra m iz . Qu t b π da n
krivoship B nuqtasining nomal tezlanish vektorini aylanish markaziga yo’naltirib, ya’ni B nuqtadan A nuqtaga qa rab o’tqa zamiz. Bu vektor yu qo rida aytilganidek
mexanizm sxemasidagi krivoship uzunligiga teng va parallel b o’l adi, ya’ni b
|| AB . SHatunga o’t amiz. B nuqta krivoshipga tegishli b o’l masdan shatunga
ha m tegishlidir, shuning uchun shatundagi B nuqtaning tezlanishi, krivoshipdagi B
nuqtaning tezlanishi ha mdir. SHatun tekislikda murakkab ha rakalanadi, ya’ni,
uning ha rakati B nuqtaning ko’chirma, ilgarilanma va B nuqta atrofida aylanma ha rakatidan iborat. SHunday qi lib, C nuqtaning shatundagi B nuqtaga nsibatan tezlanishi nisbiy normal va tangentsial tezlanishini aniqlash uchun qu yidagi vektor tenglamani yechish kerak:
a С a B a CB a B a n a
CB CB
S nuqta shatunga tegishli b o’l ish bilan birga polzunga ha m tegishli, shuning uchun ularning tezlanishi bir xildir. Polzun yo’naltiruvchi b o’l ib, ilgarilanma ha rakatlanadi, shu sababli S nuqtaning tezlanish ta’sir chizi g’i gorizontal yo’nalgan b o’l adi. Bu tezlanish absolyut, shu sababli qu tb C nuqtaning B nuqtaga nisbatan normal tezlanishi, uning B nuqta atrofida nisbiy ha rakatdagi burchak tezligi ma’lumligi tufayli aniqlanadi. Bu vektorning chizmadagi ifodasini, ya’ni tezlanishlar rejasida k o’r satilganidek vektor uzunligini aniqlaymiz. Vektor tenglamaga asosan grafik qo’ shishni bajarib, bu vektorni B nuqta tezlanish vektorlarining oxiridan qo’ yib, ya’ni, B nuqtadan shatunga parallel ravishda C nuqtadan B nuqtaga yo’nalishda – nisbiy aylanish markaziga ( bn 3.10-rasmda). (3.6) ni hi sobga olib, vektor uzunlikni qu yidagicha topamiz:
a n
ВС 2 BC ( bc ) 2 2
a CB bn CB 2 l 1
n
( BC ) 2 2
a 2
l 1
l 1
Q is qa rtirilgandan keyin qu yidagini ho sil qi lamiz:
( b c ) 2
bn ( m m )
( 3 . 10 )
BC
Tangentsial nisbiy tezlanishning ha rakat chizi g’i ni vektor tenglamaga asosan
qi l i b , bn
grafik qo’ shish natijasida, shatunga perpendikulyar
v e kt o r n i
o’tqa zamiz. S nuqtaning tezlanish ta’sir chizi g’i gorizontal chiziq bilan bu chiziqning uchrashish nuqtasida q i di rilayotgan nuqta S с vektorning oxiri (S nuqtaning absolyut tezlanishi) va nc (nuqtaning tangentsial tezlanishi) topiladi. bn normal va nc tangentsial nisbiy tezlanish vektorining yi g’i ndisi bc t o’l a nisbiy tezlanish vektorini beradi. S nuqtaning tezlanishi esa yu qo rida tezliklar rejasida k o’r satilganidek, s nuqta tezlanishlar rejasida bc kesmaning o’r tasida joylashgan b o’l adi.
Tezlanishlar rejasi mexanizmdagi chiziqli tezlanishning yo’nalishi va proportsiyasini k o’r satadi. Chiziqli va burchak tezlanishlar qi ymati tezlanishlar rejasidan formula or qa li topiladi. Chiziqli tezlanish – tezlanish masshtabini hi sobga olib (polzun tezlanishi) qu yidagicha topiladi:
a 3 a C c a (m/s 2 )
SHatunning burchak tezlanishini nisbiy ha rakatdagi tangentsial tezlanishni shatun uzunligiga teng radius-vektorga b o’l ib topamiz. O’a qiqi y tezlanishlarni tezlanish rejasi va mexanizm sxemasidagi qi ymatlarga almashtirib qu yidagini ho sil qi lamiz:
a
nc 2
2 CB l 1
BC BC l
Q is qa rtirilgandan keyin olamiz:
nс
2
(rad/s)
( 3 . 11 )
1
2
BС
SHatunning burchak tezlanish yo’nalishini nc vektor k o’r satadi, shartli ravishda mexanizm sxemasining S nuqtasiga tezlanishlar rejasidan ko’chiriladi. Berilgan ho latda shatunning burchak tezlanishi soat strelkasiga qa rama- qa rshi yo’naltirilgan, burchak tezlik singari, bunda tezlanuvchan ha rakatlanadi.
H ulosa qi lganda, zveno va nuqtalarning tezlanish va qi ymatlari mexanizmlarni kuchga hi soblashga inertsiya kuch va momentlarni topishda foydalaniladi .
1. Kinematik diagrammalar.
Yo’l diagrammalari berk trayektoriyalar bo’yicha harakat qilayotgan nuqtalar uchun quriladi. Oraliq diagrammalari harakat qaytar qilayotgan nuqtalar uchun quriladi, masalan B nuqta uchun , Ko’chish diagrammalari Belgilangan trayektoriyalarning tegishli kesimlarni ulash yo’li bilan quriladi.
Ilgarilanma – qaytar harakat qiladigan B nuqta uchun oraliq diagramasini ko’ramiz. Bu ma’lum bir ulash boshidan harakat qi;ayotgan B nuqtagacha masofaning o’zgarishini vaqt bo’yicha grafik bog’lanish. Qabul qilamiz, eng chetdagi B 0 holatdan. Bu S B0B1 , S B0B2 va h.k kesmalar uzunliklari chizmadagi ularga tegishli kesmalar : B 0 B 1 , B 0 B 2 va h.k.
Diagrammani qurishga o’tamiz.
1). 0S, 0t o’zaro perpendicular sistemada absisa o’qini teng 6 bo’lakga bo’lamiz.
Vaqt masshtabi
60 60
0 , 0025 s/ m m
T
t
X n X 100 240
T 1 T
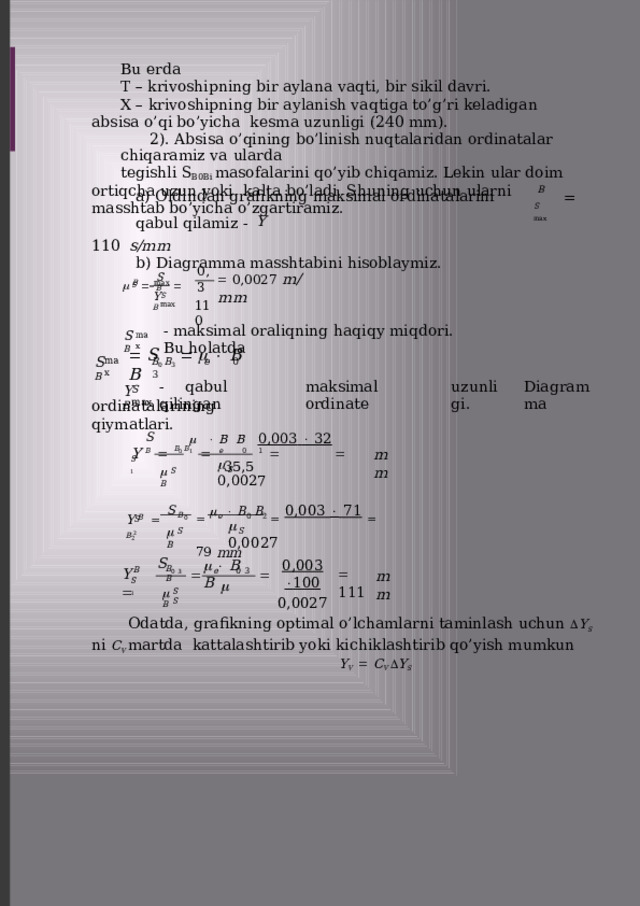
Bu erda
T – krivoshipning bir aylana vaqti, bir sikil davri.
X – krivoshipning bir aylanish vaqtiga to’g’ri keladigan absisa o’qi bo’yicha kesma uzunligi (240 mm).
2). Absisa o’qining bo’linish nuqtalaridan ordinatalar chiqaramiz va ularda
tegishli S B0Bi masofalarini qo’yib chiqamiz. Lekin ular doim ortiqcha uzun yoki kalta bo’ladi. Shuning uchun ularni masshtab bo’yicha o’zgartiramiz.
B
S max
a) Oldindan grafikning maksimal ordinatalarini qabul qilamiz - Y
110 s/mm
b) Diagramma masshtabini hisoblaymiz.
=
S B
0,3
110
B max
0,0027 m/mm
Y B
S
S max
S B
- maksimal oraliqning haqiqy miqdori. Bu holatda
max
S B
S B B
max
B 0 B 3 e 0 3
Y B
- qabul qilingan
maksimal ordinate
uzunligi.
D i a g ra m m a
S max
ordinatalarining qiymatlari.
S B B 0,003 32
Y B B 0 B 1 e 0 1 35,5
m m
B
S 1
0 , 0027
S
S
e B 0 B 2 0,003 71 79 mm
Y B S B 0 B 2
B
S 2
0 , 0027
S
S
0,003 100
0,0027
S
B B
B B
B
Y
111
e 0 3
m m
0 3
B
S 3
S S
Odatda, grafikning optimal o’lchamlarni taminlash uchun Y S ni C V martda kattalashtirib yoki kichiklashtirib qo’yish mumkun
Y V C V Y S
M
a = 0 , 8 7 m / ( s * m m )
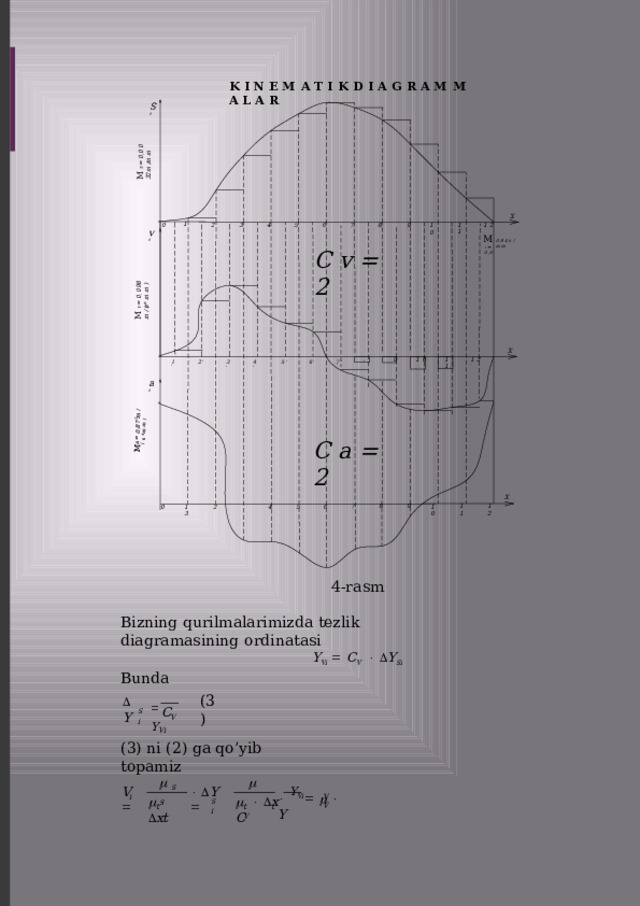
K I N E M A T I K D I A G R A M M A L A R
S t
M S = 0 ,0 0 3 2 m /m m
Х
1 2
M t = 0 ,0
1
2
0
7
3
4
5
1 1
8
6
1 0
9
v t
0 8 4 s / m m
C v = 2
M V = 0 ,0 9 8 m / (s* m m )
Х
1 1
7 1
6 1
2 1
4 1
5 1
3 1
1 2 1
1
8 1
1 1 1
1 0 1
9
a t
2
C а = 2
Х
9
8
7
1 2
1 1
0
1 0
5
6
1 2 3
4
4-rasm
Bizning qurilmalarimizda tezlik diagramasining ordinatasi
Y Vi C V Y Si
Bunda
Y Vi
( 3 )
Y
S i
C
V
(3) ni (2) ga qo’yib topamiz
S S
Y
V
Y Vi Y
V V
i
S i
x C
xt
t t V
t
B u nd a
S 0 , 0027
m / s
0,027
V
x C 0 , 0025 40 1 mm
t t V
V - tezliklar diagrammasining masshtabi,
x t - bir interval vaqt uzunligi
C V - ortirmani o’zgartisrish koeffitsenti
S - ko’chish masshtabi
t - vaqt masshtabi
Anolagik yo’l bilan tezlanish diagrammasi quriladi. Tezlanish masshtabi:
V 0,027 m / s 2
( 5 )
0,27
a
x C 0 , 0025 40 1 mm
t t a
XULOSA
- Mexanizm kinematikasini o`rganish usullari turlicha va ularning xar biri o`z afzalliklariga ega.
- Tabiatda absolyut harakat mavjud emas, barcha harakatlar nisbiydir.
- Mexanizmning turli xolatdagi planini tuzishda masshtab tanlash muhimdir.
SAVOLLAR
- Mexanizm kinematikasi nimani o`rgatadi?
- Mexanizm qanday bo`g`inlardan tashkil topgan?
- Tekislikda harakatlanuvchi ko`p bo’g’inli mexanizmlar harakati necha xil bo`ladi?
- Mexanizmlar kinematikasini o`rganishni necha xil usullari bor?
- Mexanizm xolatlar plani qanday quriladi?
- Analitik kinematika qanday usul?
- Uzunlik masshtabi qaysi formula orqali aniqlanadi?
- Nuqtalarning tezlik va tezlanishlari qanyday aniqlanadi?








Полезное для учителя




Распродажа видеоуроков!

1760 руб.
2710 руб.

1830 руб.
2820 руб.

1140 руб.
1760 руб.

1830 руб.
2820 руб.
ПОЛУЧИТЕ СВИДЕТЕЛЬСТВО МГНОВЕННО

* Свидетельство о публикации выдается БЕСПЛАТНО, СРАЗУ же после добавления Вами Вашей работы на сайт
Удобный поиск материалов для учителей
Проверка свидетельства