МАОУ СОШ № 35 г. Томска
| Цель урока | Конструирование робота линейный ползун с рассмотрением используемого в нем датчика цвета. |
| Планируемый результат обучения | Деятельностные универсальные учебные действия Ученик научится: определять цель деятельности на уроке с помощью учителя; работать по предложенному учителем плану; использовать схему для сбора модели; делать выводы о результате совместной работы класса и учителя; составлять алгоритм сбора модели. Регулятивные универсальные учебные действия Ученик научится: планировать пути достижения целей; уметь самостоятельно контролировать своё время и управлять им; принимать решения в проблемной ситуации на основе переговоров; Коммуникативные универсальные учебные действия Ученик научится: работать в группе (планировать работу, распределять её между членами группы, совместно оценивать результат работы, слушать собеседника и вести диалог); Познавательные универсальные учебные действия Ученик научится: |
| Основные понятия | Модель, деталь, датчик света |
| Этапы урока | Формируемые УУД | Деятельность учителя | Деятельность учащегося |
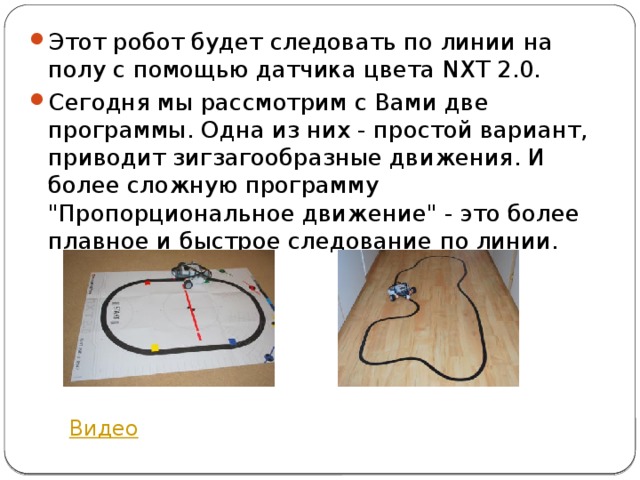
| Целеполагание и мотивация | Личностные УУД (Осмысление внутренней позиции ученика на уровне положительного отношения к уроку) Регулятивные УУД (Самоорганизация и организация своего рабочего места) | Знакомство учащихся с датчиком цвета. Учитель показывает и рассказывает. Датчик цвета совмещает три функции: Позволяет роботу различать цвета Позволяет роботу различать уровень освещенности путем измерения яркости отраженного света Цветовая подсветка Сегодня, на примере робота ползуна мы рассмотрим вторую функцию будем различать уровень освещенности путем измерения яркости отраженного света | Ответы на вопросы учителя. |
| Актуализация знаний и фиксирование затруднения | Познавательные УУД (Осознание учащимися компонентов учебной деятельности и мотивов собственных действий) Познавательные УУД (Актуализация изученных способов действий, достаточных для построения новых знаний) | Учитель показывает, как работать с датчиком. Выберите порт, к которому подключен Датчик цвета. По умолчанию Блоку «Датчик цвета» назначен Порт 3. При необходимости эту настройку можно изменить. Пороговое значение можно задать движком или ввести нужное значение в поле. Активируйте кнопку выбора справа от движка, чтобы блок срабатывал при уровнях освещённости, превышающих пороговое значение; активируйте левую кнопку выбора, чтобы блок срабатывал при уровнях освещённости более низких, чем пороговое значение. Для задания условия срабатывания датчика можно воспользоваться открывающимся списком. Если установлен флажок «Включить освещение», датчик включает свою лампу подсветки и регистрирует отражённый свет. В поле обратной связи отображаются текущие показания Датчика освещённости (0-100%). | Осмысливают. Задают вопросы
|
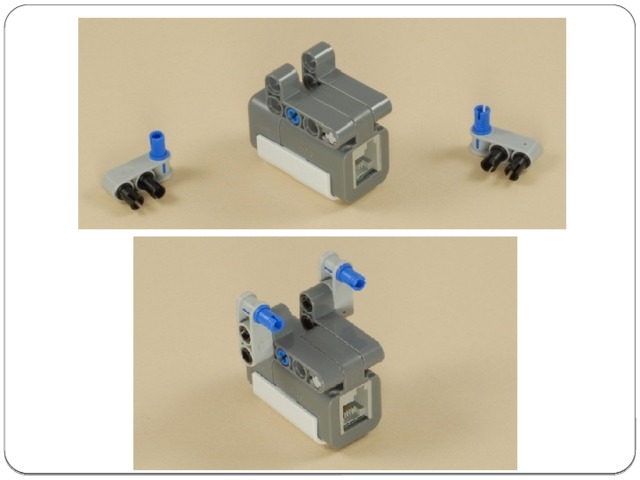
| Выявление места и причины затруднения | Познавательные УУД (Активизация мыслительной деятельности через проблемное задание) Регулятивные УУД (Определение и формулирование цели деятельности на уроке с помощью учителя) Коммуникативные УУД (Оформление своих мыслей согласно заданным рамкам обсуждения, аргументация своих суждений) | Необходимо собрать модель робота линейный ползун, скачать и загрузить в память NXT две программы, предназначенные для "Линейного ползуна". Обе программы используют цветовой датчик в режиме "Light Sensor". В этом режиме горит только красная светодиодная лампа датчика. Датчик измеряет количество света, который отражается обратно в датчик, получая в итоге значение от 0 до 100.
Конечно, можно использовать цветовой датчик в полноцветном режиме, но для решения именно этой задачи одного цвета достаточно. | Беседа. Задают вопросы |
| Построение проекта выхода из затруднения | Познавательные УУД (Ориентирование в условных обозначениях) Регулятивные УУД (Осмысление выделенных педагогом ориентиров действия в новом учебном материале) Коммуникативные УУД (Участие в работе группы, распределение роли, общение друг с другом) Познавательные УУД (Умение с большой долей самостоятельности работать с моделями) | Деление детей на группы. Выдача коробок с деталями. Беседа о правилах по технике безопасности. | Ответы. Работа над моделью Робота.
|
| Первичное закрепление | Регулятивные УУД (Проявление самостоятельности и инициативы в разных видах деятельности) Познавательные УУД (Умение следовать образцу и правилу) Познавательные УУД (Выведение общего для целого ряда слов на основе выделения существенной связи) | Рассмотрение схемы модели. Распределение обязанностей. | Обсуждение в группах. |
| Самостоятельная работа | Познавательные УУД (Понимание смысла задания; возможность применить первоначальные способы поиска информации) Коммуникативные УУД (Осуществление взаимоконтроля по ходу выполнения задания) | Консультирование учащихся во время работы. Ответы на вопросы.
| Групповая работа. Сборка робота. Загрузка программы. Запуск робота. Испытание модели. Учащиеся, которые собрали робота и проверили 2 программы его работы, могут выполнить дополнительные задания. |
| Рефлексия учебной деятельности на уроке (итог) | Личностные УУД (Оценивание разного вида деятельности на уроке) Регулятивные УУД (Формирование умение адекватно оценивать свою деятельность и деятельность своих товарищей) | Подведение итогов занятия. | Демонстрация Выступление перед классом, с проговариванием своей работы и получившегося результата.
|