Құю және жылу цехтарындағы кешенді автоматтандыру мәселесін шешу еңбек процестеріндегі адамның әрекетін еліктейтін түбегейлі жаңа машиналарды қолдану арқылы ғана мүмкін болады. Мұндай машиналар өндірістік Роботтар болып табылады, олардың жетектері әр ұтқырлық дәрежесі бойынша басқарылатын жетектері бар көп буынды манипуляторлар болды.
Робот терминін атақты жазушы К.Чапек 1920 жылы өзінің "Рур" (Россум әмбебап роботтары) фантастикалық пьесасында енгізген. Бұл сөз ауыр физикалық жұмыстардағы адамдарды ауыстыру үшін тағайындалған механикалық жұмысшылар деп аталды. Өнеркәсіптік робот термині 70-ші жылдары пайда болды.
Вы уже знаете о суперспособностях современного учителя?
Тратить минимум сил на подготовку и проведение уроков.
Быстро и объективно проверять знания учащихся.
Сделать изучение нового материала максимально понятным.
Избавить себя от подбора заданий и их проверки после уроков.
Просмотр содержимого документа
«Өнеркәсіптік роботтар туралы жалпы мәліметтер»
№23
Өнеркәсіптік роботтар туралы жалпы мәліметтер
* Өнеркәсіптік роботтардың негізгі анықтамалары мен жіктелуі
* Өнеркәсіптік роботтардың құрылымы
* Роботтардың негізгі техникалық көрсеткіштері
Құю және жылу цехтарындағы кешенді автоматтандыру мәселесін шешу еңбек процестеріндегі адамның әрекетін еліктейтін түбегейлі жаңа машиналарды қолдану арқылы ғана мүмкін болады. Мұндай машиналар өндірістік Роботтар болып табылады, олардың жетектері әр ұтқырлық дәрежесі бойынша басқарылатын жетектері бар көп буынды манипуляторлар болды.
Робот терминін атақты жазушы К.Чапек 1920 жылы өзінің "Рур" (Россум әмбебап роботтары) фантастикалық пьесасында енгізген. Бұл сөз ауыр физикалық жұмыстардағы адамдарды ауыстыру үшін тағайындалған механикалық жұмысшылар деп аталды. Өнеркәсіптік робот термині 70-ші жылдары пайда болды.
Робот-бұл рецептордан (сезімтал элементтен), ақпарат түрлендіргішінен, сақтау құрылғысынан, манипулятордан (атқарушы элементтен) және осы элементтерді Қосатын байланыс арналарынан тұратын сыртқы кері байланыс машинасы. Қолданыстағы Робот конструкциялары үш сыныпқа бөлінеді: гуманоидты, ақпараттық және өнеркәсіптік роботтар.
Гуманоидты роботтар негізінен жарнамалық мақсатта жасалды, дегенмен оларды әртүрлі практикалық мақсаттарда қолдануға тырысты. Ақпараттық Роботтар жоғары жетістіктерге жетті. Олар адам әлі өмір сүре алмайтын жерде қолданылады (жер мен Айдың спутниктері, "Луноход-1" және "Луноход-2" және т.б.). Өнеркәсіптік роботтар (PR) адамның физикалық еңбегін ауыстыруға арналған.
Манипулятор-бұл адамның моторикасы мен жұмыс қолын модельдеуге арналған құрылғы. Манипуляция объектісі кеңістікте манипулятормен қозғалатын дене деп аталады. Манипуляция объектілері бөлшектерді, бланкілерді және әртүрлі құралдарды қамтиды.
Басқару әдісіне сәйкес барлық манипуляторларды биотехникалық, яғни қолмен басқарылатын, интерактивті (аралас басқару) және автоматты деп бөлуге болады.
Қолмен басқарылатын Манипулятор-оператор қашықтан немесе тікелей жұмыс органдарының қозғалысы есебінен басқаратын манипулятор.
Жетекші органның түріне байланысты қолмен басқарылатын манипуляторлар көшіру, командалық және жартылай автоматты болуы мүмкін.
Көшіру манипуляторында жұмыс органының қозғалысы адамның щеткасының қозғалысын қайталайды. Командалық манипуляторда жұмыс органының қозғалысы түймелердің, ат тұтқаларының көмегімен жеке-жеке ұтқырлықтың әр дәрежесі бойынша жүзеге асырылады. п. жартылай автоматты манипуляторда жетекші орган бірнеше еркіндік дәрежесін басқаратын тұтқаны және сигналдарды тұтқадан атқарушы немесе жұмыс органдарының қозғалысын басқаратын сигналдарға айналдыратын микроэвмды қамтиды.
Автоматты манипуляторлардың қатарына автооператорлар, интерактивті басқарылатын өнеркәсіптік роботтар жатады.
Автооператор-бағдарламаланбайтын Автоматты манипулятор. Өнеркәсіптік робот (PR) — қайта бағдарламаланатын Автоматты манипулятор. Интерактивті басқарылатын манипуляторларды оператор кезекпен басқарады немесе автоматты түрде әрекет етеді. Оларда жеке әрекеттерді автоматты түрде орындауға арналған жад құрылғылары бар.
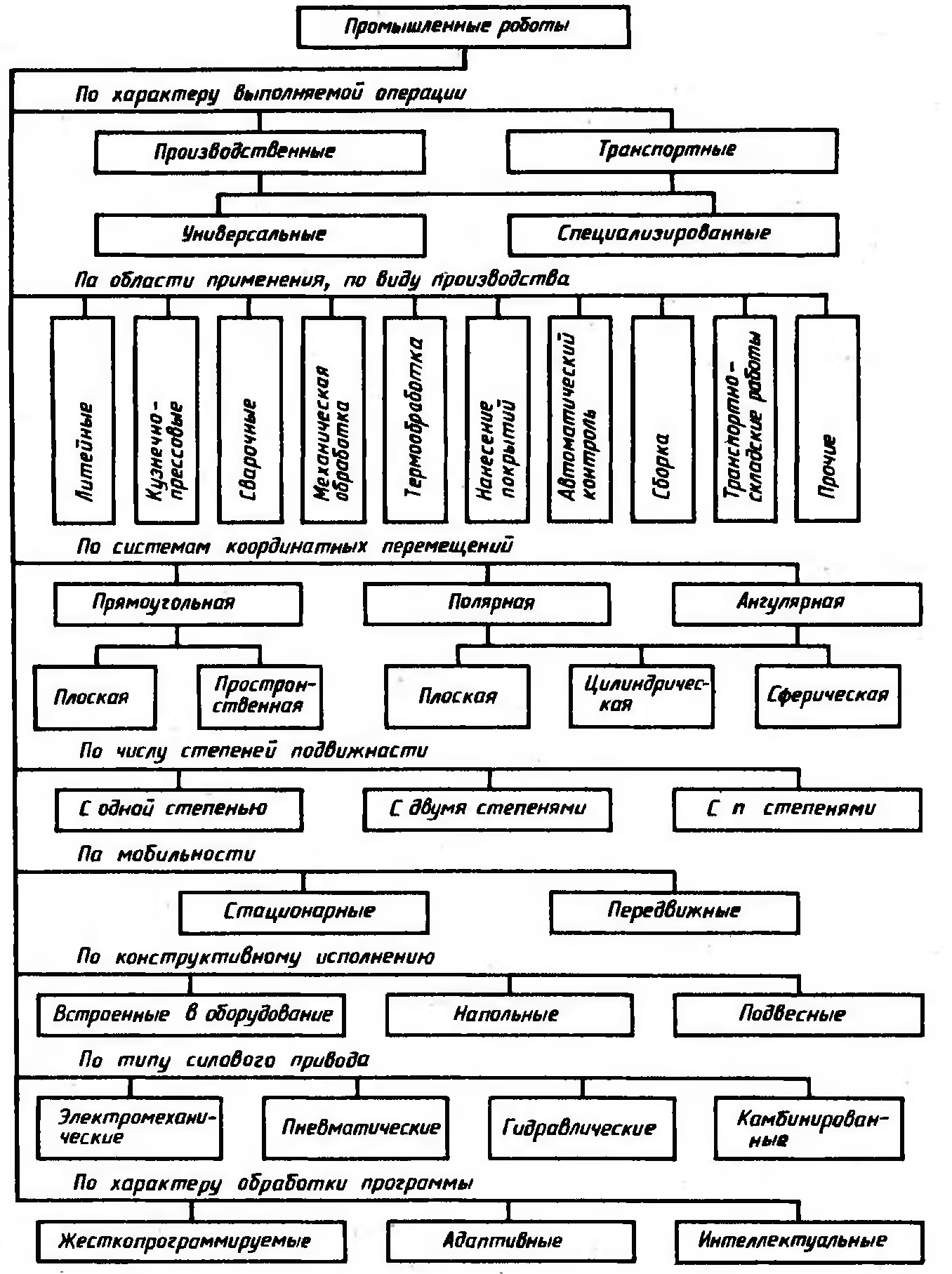
Өнеркәсіптік роботтар. Мақсаты бойынша PR-ны өндірістік және көліктік деп бөлуге болады (сурет. 162).
Өндірістік Роботтар әртүрлі өндірістердің технологиялық процестерінің негізгі операцияларын жүзеге асырады (құю, дәнекерлеу, механикалық өңдеу, соғу, бояу). Олар белгілі бір құралмен жабдықталған. Көлік роботтары дайындамаларды, бөлшектер мен тораптарды операцияаралық беруге арналған. Олар жабдықты автоматты түрде жүктейді және түсіреді, Дайын бөлшектерді жеткізеді және сақтайды, технологиялық және көліктік жабдықтарға қызмет етеді.
Роботтардың осы түрлерінің әрқайсысы мамандандырылған немесе жан-жақты болуы мүмкін. Мамандандырылған роботтар өндірістің белгілі бір түрлерінің технологиялық және көліктік операцияларын орындауға арналған; әмбебап-өндірістің әртүрлі түрлеріндегі негізгі, көмекші, бақылау, Көлік және басқа жұмыстарды орындауға арналған.
Электр жетегінің түрі электромеханикалық, пневматикалық, гидравликалық және аралас роботтарды ажыратады.
Бағдарламаны әзірлеу сипатына сәйкес қатаң бағдарламаланатын, бейімделетін және ақылды роботтар ерекшеленеді.
Қатты бағдарламаланатын Роботтар-бұл бірінші буын роботтары және бағдарламалық басқару құрылғысы бар манипуляторлар. Мұндай робот қатаң бағдарламаланған операциялардың жиынтығын орындайды. Роботтың бағдарламалық жасақтамасы басқа операциялар жиынтығына қайта құрылуы мүмкін. қатаң бағдарламаланған операциялар. Роботтың бағдарламалық жасақтамасы басқа операциялар жиынтығына қайта құрылуы мүмкін.
Адаптивті Роботтар-екінші буын роботтары. Олар сенсорлық жүйемен жабдықталған, ол белгілі бір және жиі өзгеретін ортада оған бейімделе отырып, автоматты түрде басқарылатын іздеу режимдерінде жұмыс істеуге мүмкіндік береді. Мұндай роботтардың атқарушы "қолдары" әр түрлі бастапқы түрлендіргіштермен жабдықталған, олар қол мен заттардың күйі туралы ақпарат береді.
Интеллектуалды Роботтар-үшінші буын роботтары. Жасанды көру және басқа да бірқатар құрылғылардың көмегімен олар жағдайды қабылдай және тани алады, қоршаған орта моделін құра алады, әрі қарайғы әрекеттер туралы автоматты түрде шешім қабылдай алады және оны орындай алады, өз тәжірибесін жинақтаған сайын мінез-құлқын өзгерте алады және өзін-өзі үйренеді.
Өндірісте қолданылатын роботтардың басым көпшілігі бірінші буын роботтарына жатады. Мұндай роботтардың жұмыс істеуін қамтамасыз ету үшін құны роботтың өзіндік құнының 40% - на жететін арнайы жабдықтар мен қосалқы жабдықтарды жасау қажет. Сондықтан қатаң басқару жүйесі бар роботтарды енгізудің баламасы бейімделгіш роботтарды қолдану болып табылады.
Өнеркәсіптік роботтарды жіктеу басқа белгілерге сәйкес мүмкін (суретті қараңыз. 162).
Өнеркәсіптік роботтардың құрылымы. Класына, түріне және мақсатына қарамастан, әр PR екі негізгі жүйеден тұрады: Механикалық жүйе және басқару жүйесі.
Механикалық жүйе қозғалыс функцияларын қамтамасыз етеді және т. б.технологиялық мақсатын жүзеге асырады. оның құрамына келесі негізгі түйіндер кіреді: тірек конструкциялары, жетектер, беріліс механизмдері, жетектер және ұстау құрылғылары.
Мойынтірек құрылымы-бұл барлық басқа түйіндер Орнатылатын төсек (жақтау).
Жетектер Электрлік, пневматикалық, гидравликалық және аралас болуы мүмкін.
Атқарушы механизм-бұл манипуляция объектісіне немесе өңделген ортаға әсер етуге арналған жылжымалы байланысқан сілтемелер жиынтығы.
Тасымалдау және бағдарлау қозғалыстарын жүзеге асыратын атқарушы механизм PR-ның қолы деп аталады.
Қазіргі заманғы өнеркәсіптік роботтардың көпшілігінде бір атқарушы механизм бар, бірақ екі, үш немесе одан да көп механизмдермен жабдықталған роботтар бар. Дизайн бойынша олар стационарлық, тартылатын, телескопиялық, топсалы және т. б. болуы мүмкін.
Роботтың қолын еңкейту мүмкіндігі оның қозғалғыштығын арттыруға көмектеседі және еден деңгейінде жүктемені басқаруға мүмкіндік береді.
Қатты немесе телескопиялық тұтқасы бар PR қажетті қозғалыстарды орындай алады және салыстырмалы түрде әмбебап.
Тұтқаның маневрлігі ұтқырлық дәрежелерінің санымен анықталады.
Түсіру құрылғысы-механикалық жүйенің түйіні, ол манипуляция объектісін белгілі бір күйде ұстап тұруды қамтамасыз етеді. Манипуляция объектілері әртүрлі өлшемдер мен пішіндерге ие болуы мүмкін болғандықтан, басып шығару құрылғылары ауыстырылатын элементтердің қатарына жатады.
Сур. 162. Өнеркәсіптік роботтардың жіктелуі
ПР—дың көп бөлігі үш-бес қозғалғыштығы бар атқарушы құрылғылармен жабдықталған, қысқыш құрылғы әдетте тағы екі қозғалғыштыққа ие, ал төсек бір-екі дәрежеге ауыса алады.
Роботтың органдары қозғалатын координаттар жүйелері, қозғалғыштық дәрежелерінің санымен қатар, қызмет көрсетілетін кеңістік аймағына айтарлықтай әсер етеді. Егер тік бұрышты координаттар жүйесінде бірлік ретінде қозғалыс қабылданса (қозғалғыштықтың бір дәрежесінде), онда қызмет көрсету аймағы артады: цилиндрлік координаттарда қозғалу кезінде 9,6 есе; полярлы — 29,7 есе; сфералық — 87,2 есе.
Бағдарламалық жасақтаманы басқару жүйесі бағдарламалауға, басқару бағдарламасын сақтауға, оны ойнауға және өңдеуге арналған. Бағдарламалық жасақтаманы басқару жүйесіне басқару бағдарламасының енгізу-шығару құрылғылары, оны есте сақтау және сақтау кіреді. Басқару бағдарламасы-бұл белгілі бір ресми тілде жасалған қарапайым нұсқаулар тізбегі. Оны механикалық аялдамалар мен көшірмелердің, әртүрлі қосқыштардың (мысалы, штепсель панельдерінің) көмегімен де, жылдам өзгеретін медианың (перфолент, магниттік таспалар, дискілер және т.б.) көмегімен де бекітуге болады.
Жылдам ауысымды тасымалдаушылардан басқару бағдарламасын енгізу құрылғысы ретінде Байланыс және байланыссыз оқу құрылғылары (перфолентпен), сондай-ақ әртүрлі магниттік дискілер қолданылады.
Роботтардың негізгі техникалық көрсеткіштері. ПР-дың негізгі техникалық көрсеткіштеріне жүк көтергіштігі, ұтқырлық дәрежелерінің саны, позициялау қателігі, жұмыс аймағы, ұтқырлық және т. б.
ПР жүк көтергіштігі оның қолдарының жалпы жүк көтергіштігі ретінде анықталады. Қолдың жүк көтергіштігі-бұл робот басқара алатын жүктің ең үлкен массасы (оның ішінде түсіру құрылғысының массасы). ПР-дың кейбір түрлері үшін маңызды көрсеткіш-бұл берілген жағдайларда атқарушы механизм жасаған күш (немесе момент). Мұндай көрсеткіштерге қысқыш күш немесе қысқыш құрылғының айналу (айналу) моменті жатады.
Ұтқырлық дәрежелерінің саны-манипуляция объектісінің мүмкін болатын координаталық қозғалыстарының қосындысы. Роботтардың кейбір түрлері үшін кейде қысқыш құрылғының қозғалғыштық дәрежелерінің саны қосымша анықталады.
Позициялау қателігі-бірнеше позициялау (қозғалысты қайталау) кезінде атқарушы механизмнің берілген позициясының нақты позициядан ауытқуы. Ол сызықтық немесе бұрыштық өлшем бірліктерінде бағаланады.
Жұмыс аймағы-жұмыс кезінде қысқыш құрылғы болуы мүмкін кеңістік. Роботтың атқарушы құрылғысының қызмет көрсету коэффициенті әртүрлі бағыттардан берілген нүктеге кірісу мүмкіндігін сипаттайды және оның мотор мүмкіндіктері туралы түсінік береді.
Өнеркәсіптік роботтың қозғалғыштығы оның қозғалу қабілетімен анықталады.
Бақылау сұрақтары мен тапсырмалары
1. Робот деген не?
2. Бұл деп аталады манипулятормен?
3. Манипуляторлардың түрлері және оларды басқару түрлері туралы айтып беріңіз.
4. Өнеркәсіптік және интерактивті роботтың айырмашылығы неде?
5. Өнеркәсіптік роботтар қандай сипаттамаларға сәйкес жіктеледі?
6. Өнеркәсіптік роботтарды басқару жүйелері туралы айтып беріңіз.
7. Өнеркәсіптік роботтардың құрылымы туралы айтып беріңізші.
8. Роботтардың негізгі техникалық көрсеткіштерін тізімдеңіз және оларға анықтама беріңіз.