Сабақтың барысы:
І.Ұйымдастыру кезеңі
ІІ. Робототехника тарихы
IІІ. Қазіргі заманда робот техникасын қолдану саласы, «ROBOTIS BIOLOID STEM» бағдарламасының жасалу жолдары.
IV. Тәжірибелік шеберлік жұмыстар жасау
V.Қорытындылау
Создайте Ваш сайт учителя Видеоуроки Олимпиады Вебинары для учителей
Сабақтың барысы:
І.Ұйымдастыру кезеңі
ІІ. Робототехника тарихы
IІІ. Қазіргі заманда робот техникасын қолдану саласы, «ROBOTIS BIOLOID STEM» бағдарламасының жасалу жолдары.
IV. Тәжірибелік шеберлік жұмыстар жасау
V.Қорытындылау






ҚАРМАҚШЫ АУДАНДЫҚ БІЛІМ БЕРУ МЕКЕМЕСІ «№273 ОРТА МЕКТЕБІ» КОММУНАЛДЫҚ МЕМЛЕКЕТТІК МЕКЕМЕ
Ж ОБА
ОБА
«Роботтық техниканың жасалу жолдары»
№273 орта мектептің
9 «Ә» сынып оқушысы: Сәрсенбаева Асель
БАЙҚОҢЫР
2018 жыл
| Бекітемін Оқу ісінің меңгерушісі _____________ «_______»____________ж. | Күні:19.01.2018 ж. Сыныбы:9 «А», «Ә», «Б» Өтетін орны: кинозал Өткізетін: Сатлабаев М. |
Сабақтың тақырыбы: ШЕБЕРЛІК КЛАСЫ «Роботтық техниканың жасалу жолдары»
Сабақтың мақсаты:
Робот техникасы саласын кеңінен насихаттау.
Оқушылардың робот техникасына қызығушылықтарын арттыру, шапшаңдыққа баулу, белсенділіктерін арттыру;
ROBOTIS BIOLOID STEM бағдарламаларында жұмыс жасай алу;
Робототехника пәні мұғалімдерімен тәжірбие алмасу;
Көрнекілігі: слайд-шоу, видео, ROBOTIS BIOLOID STEM бағдарламасы.
Пәнаралық байланыс: информатика, физика, математика.
Қатысушылар: 9 «А», «Ә», «Б» сыныптар оқушылары.
Роботтар — қарқынды дамып келе жатқан болашақтың жоғарғы технологияларының бірі. Қазіргі кезде роботтар өміріміздің көптеген саласына, атап айтқанда, ғарышты игеру, денсаулық сақтау, өндіріс, қоғамдық қауіпсіздікті қамтамасыз ету, қорғаныс ісі және басқа да салаларға еніп үлгерді.
Сабақтың барысы:
І.Ұйымдастыру кезеңі
ІІ. Робототехника тарихы
IІІ. Қазіргі заманда робот техникасын қолдану саласы, «ROBOTIS BIOLOID STEM» бағдарламасының жасалу жолдары.
IV. Тәжірибелік шеберлік жұмыстар жасау
V.Қорытындылау
І.Ұйымдастыру кезеңі
ШЕБЕРЛІК КЛАСЫ «Роботтық техниканың жасалу жолдары»
II - кезең: «Робототехника тарихы».
Бұл кезеңді оқушыларға робот техникасың тарихымен таныстырған Сахитжанова Айда 9 «Ә» сыныбы.

Робот (чех. robot, robota — еріксіз еңбек, rob — құл; чех жазушысы К. Чапек ойлап шығарған сөз, ол алғашқы ұғымында “жұмысқа шебер адам” мағынасында қолданылды) — антропоморфтық (адам тәрізді) әрекеттер, қимылдар жасайтын машина және адам жүрісі мен қимылын еліктететін автоматтандырылған кұрылғы.

1464 ж. Леонардо да Винчи 12 жасында адам тәрізді бірнеше қимыл жасауға мүмкіндігі бар гуманоид автоматының жобасын құрған болатын.
Гуманоид
автомат жобасы
 1833 ж. Чарльз Бэббидж аналитикалық машинаны құрастырды. Бұл жобаға қатысқан Ада Ловелас ең бірінші компьютерлік программист болып есептеледі.
1833 ж. Чарльз Бэббидж аналитикалық машинаны құрастырды. Бұл жобаға қатысқан Ада Ловелас ең бірінші компьютерлік программист болып есептеледі.
Ч.Бэббидждің
аналитикалық машинасы
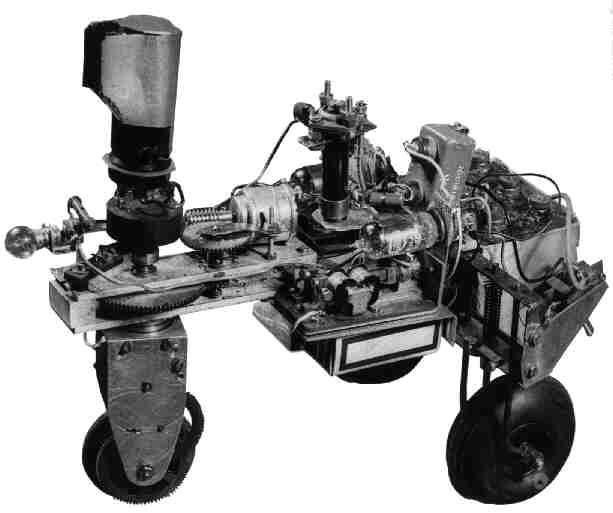
1949 ж. Уильям Грей Уолтер «Тасбақа» деп аталатын алғашқы автономды роботын құрастырды.
Роботтың түрі мен баяу қозғалуына байланысты оны «Тасбақа» деп атады.
«Тасбақа» роботы
IІІ. Қазіргі заманда робот техникасын қолдану саласы, «ROBOTIS BIOLOID STEM» бағдарламасының жасалу жолдары.
Бұл кезеңді оқушыларға қазіргі заманда робот техникасын қолдану саласын таныстырған Қалтаева Ақерке 9 «Ә» сыныбы.

Қазіргі таңда робототехника тез дамып келе жатқан сала. Технология қалай тез дамыса, робототехника да солай тез дамиды, өйткені робототехника технологиямен тығыз байланыста. Технология дамыған сайын зерттеулер, әрлендер өзгеріп дамиды, соның арқасында роботтардың қолдану аймағы да ұлғаяды. Қазіргі таңда роботтар үйде, кәсіпорындар мен әскери салада қолданылады. Көптеген роботтар миналар мен бомбаларды залалсыздандыру сынды адамдарға тікелей зардап алып келетін жағдайларда қолданылады.

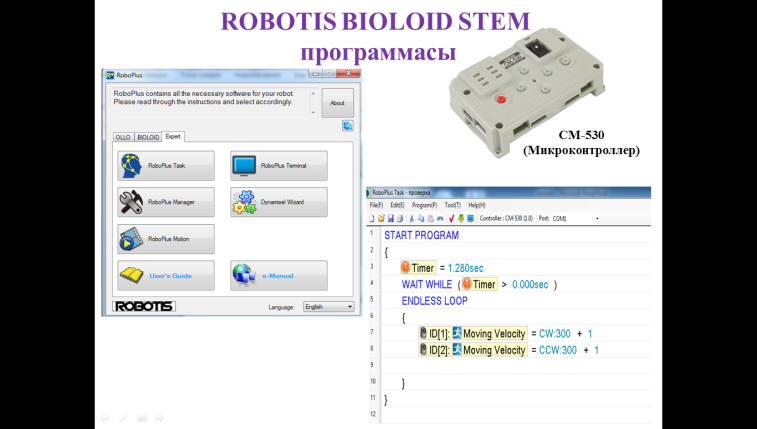
«ROBOTIS BIOLOID STEM» бағдарламасының жасалу жолдары».
Бұл кезеңді оқушыларға «ROBOTIS BIOLOID STEM» бағдарламасының жасалу жолдары» саласын таныстырған Сәрсенбаева Асель 9 «Ә» сыныбы.

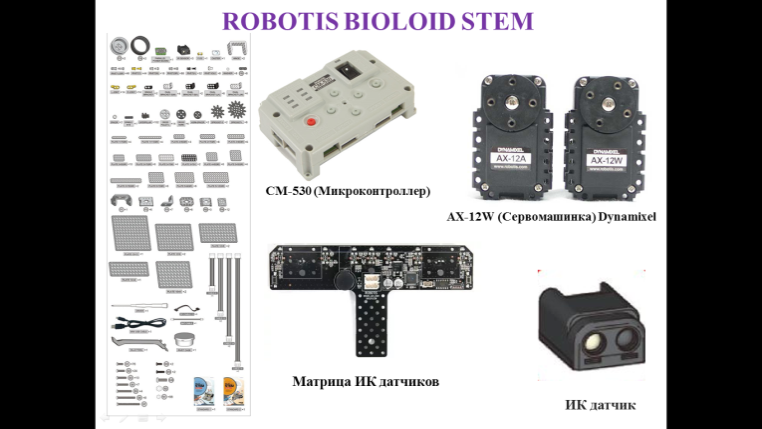
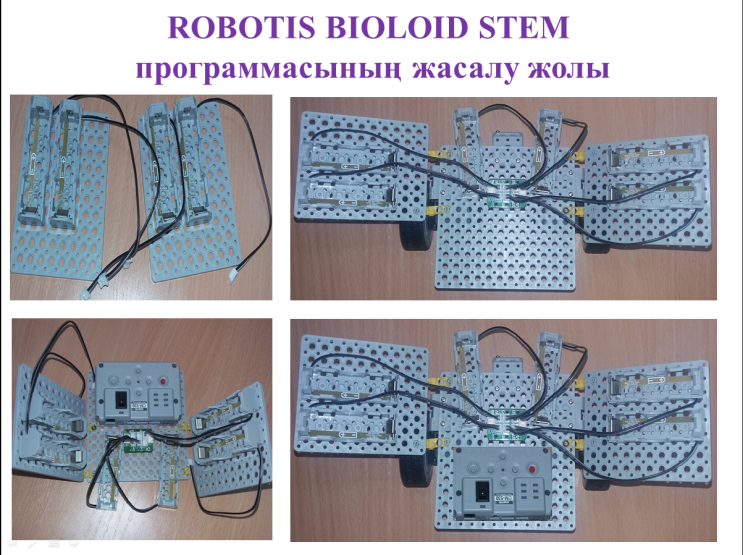
BIOLOID STEM жинағы - бұл ғылым, технолгия, инженерия және математика пәндерін оқып үйренуге арналған комплекті. Ол 16-дан астам типтік роботтарды құрастыруға арналған және 48-ші түрлі тапсырмаларды орындай алатын динамикселді жоғары сапалы сервомоторлармен, CM-530 микроконтроллермен, матрица ИК датчигімен, BIOLOID STEM бағдарласымен, ИК датчиктермен, жиынтықтар құралдарымен жабдықталған.
Робототехникалық конструктор Bioloid STEM негізгі қолданатын құрылғылары:
CM-530 микроконтроллер- бұл құрылғыға бағдарлама енгізу асқарсында роботты басқаруға арналған пульт.
AX-12W (Сервомашинка) Dynamixel- бұл роботты қозғалтуға жүргізуге арналған құрылғы.
Матрица ИК датчиков- бұл роботтың оңтайлы жүретін жолын анықтайтын құрылғы.
ИК датчик- бұл роботтың қозғалысын, кедергілерін алдын ала анықтайтын құрылғы.
IV. Тәжірибелік шеберлік жұмыстар жасау
«ROBOTIS BIOLOID STEM» бағдарламасын құрастыру үшін көрермен арасынан 2 мұғалім, 2 оқушыдан тұратын топты роботты жасауға арналған жұмыс үстеліне шақырамын. Олар топ болып арба қанатты роботтарды жасап, программасын құрып, CM-530 микроконтроллерге енгізіп жүргізеді.
V. Қорытынды
Қазіргі кезде роботтардың көптеген түрлері бар, әртүрлі орталарда әртүрлі жолмен қолданылады. Қолдану мақсаты мен сыртқы келбеті әртүрлі болғанымен, құрылымына келгенде баршасында 3 бірдей жерлері бар:
Әр робот механикалық негізі - құрылғы, рамадан тұрады. Сол раманың түрі қолданылатын мақсатына қарай өзгереді. Мысалы, робот лай мен құмның үстімен жүретін болса, шынжыр тракторлар қолданылуы мүмкін. Механикалық жағы ойлап табушының бір бөлек мәселенің шешімі, робот жүретін жердің қоршаған ортасына байланысты. Роботтың формасы атқаратын функциясымен тікелей байланысты.
Әр робот электр бөлшектерден тұрады. Сол бөлшектер робот жүйелерін толығымен бақылайды. Мысал ретінде шынжыр арқылы жүретін роботты алсақ, сол шынжырларды жүргізу үшін күш керек. Сол күш электр қуаты ретінде келіп, сымдар арқылы өтіп, батареяда сақталады; осы негізгі схема. Газбен істейтін машиналар да газды қолдану үдерісі үшін токты керек етеді. Сол себептен, газбен жүретін көлік сынды машиналарда да батареялар бар. Электр жүйесі роботтың қозғалуында (мотор) қолданылады, өлшеу үшін (электр сигналдар жылу, дауыс, тұрған жері мен энергия мөлшерін анықтау үшін) және жалпы қолдану үшін (робот жалпы негізгі операцияларды жасау үшін өз мотор мен сенсорларына біраз энергия жолдауы керек).
Барлық роботтар кішкене болса да компьютер кодын керек етеді. Сол алгоритмде робот қалай жұмыс істейтіні көрсетіледі. Код жазған адам программаның ішінде робот шешімін қалай және қашан қабылдап, әрекет ететінін жазады. Сол шынжыр арқылы жүретін робот өзінің механикалық дизайны мен құрылысының арқасында лайды керемет етіп, өзінің батареясынан сымдар арқылы керек мөлшерде энегия алса да, компьютер программасынсыз орнынан жылжымайды; өйткені программа роботқа қашан, қайда жылжу керек екендігін айтады. Программа роботтың негізгі мәнін құрады. Роботтың механикалық және электр бөлшектері керемет әрленіп, бірақ жазылған программасы нашар болса, роботтың жұмыс істеуі екі талай, істесе де, қозғалуы мен жұмыс істеуі ретсіз болады. Негізгі үш түрлі алгоритмдер бар: қашықтан басқару, жасанды интеллект және гибрид. Қашықтан басқарылатын роботтарда бұйрықтар жиынтығы бар. Ол бұйрықтарды тек қашықтан басқаратын құрылғының сигналын алғаннан кейін ғана орындайды. Жалпы айтқанда, адам сол құрылғы арқылы бір қашықтықта орналасқан роботты басқарады. Жасанды интеллект қолданылатын роботтар қоршаған ортаға байланысты шешімдерді өздері қабылдайды. Роботтың жүйесіне қоршаған ортаның факторларына, объектілеріне әртүрлі реакция жазылған. Жасанды интеллект сол реакцияларды ескере тұрып, қоршаған ортаның факторларына өзі әсер береді.
Бұл ШЕБЕРЛІК КЛАСЫ «Роботтық техниканың жасалу жолдары» сыныптан тыс сабағы оқушылардың логикалық ой-өрістерін дамытып, шапшаңдыққа, жеке және топпен жұмыс жасауына, ұйымшылдыққа ұмтылдырады.


19.01.2018 жылы «Математика ғылымының құпиясы тұңғиық, көз жетпейтін мұнарасы тым биік» атты МИФ апталығында 9 сыныптар арасында ШЕБЕРЛІК КЛАСЫ «Роботтық техниканың жасалу жолдары» атты сыныптан тыс жұмысының
қорытындысының анықтамасы
Сабақтың тақырыбы: ШЕБЕРЛІК КЛАСЫ «Роботтық техниканың жасалу жолдары»
Сабақтың мақсаты:
Робот техникасы саласын кеңінен насихаттау.
Оқушылардың робот техникасына қызығушылықтарын арттыру, шапшаңдыққа баулу, белсенділіктерін арттыру;
ROBOTIS BIOLOID STEM бағдарламаларында жұмыс жасай алу;
Сабақтың түрі: шеберлік класс
Көрнекілігі: слайд-шоу, ROBOTIS BIOLOID STEM бағдарламасы.
Пәнаралық байланыс: информатика, физика, математика.
Қатысушылар: 9 «А», «Ә», «Б» сыныптар оқушылары,мұғалімдер.
Сабақтың барысы:
І.Ұйымдастыру кезеңі
ІІ. Робототехника тарихы
IІІ. Қазіргі заманда робот техникасын қолдану саласы, «ROBOTIS BIOLOID STEM» бағдарламасының жасалу жолдары.
IV. Тәжірибелік шеберлік жұмыстар жасау
V. Қорытындылау
Сыныптап тыс жұмысымызға 7, 10, 11 сыныптар арасында 30 оқушы, 8 мұғалімдер қатысты. Ең алдымен 9 «Ә» сыныбының оқушысы Сахитжанова Айда көрермендерді робототехниканың тарихымен таныстырды. Одан кейін қазіргі заманда робот техникасын қолдану саласын, «ROBOTIS BIOLOID STEM» бағдарламасының жасалу жолдарын 9 «Ә» сыныбының оқушылары Қалтаева Ақерке, Сәрсенбаева Асель таныстырғаннан кейін, мұғалімдер мен оқушылар екі қанатты арбалы роботты құрастыруға белсене араласты. Екі қанатты арбалы роботты құрастыруға ат салысқан Әділбек, Нұрсұлтан ағайлар мен 11 «А» сыныбының оқушылары Есмурзаева Ерсін, Абдусахина Жанат тәжірбие барысында өз шеберліктерін көрсетті.











* Свидетельство о публикации выдается БЕСПЛАТНО, СРАЗУ же после добавления Вами Вашей работы на сайт