Данный мастер-класс может быть использован как занятие с начинающими преподавателями робототехники, так и занятие на уроке робототехники с обучающимися. В представленной презентации подробно рассмотрен простейший алгоритм для робота-сумоиста. Важным преимуществом данной разработки является то, что в ней показаны настройки каждого блока в среде программирования NXT-G, который наиболее часто используется в соревнованиях по образовательной робототехнике в номинации "Сумо".
Создайте Ваш сайт учителя Видеоуроки Олимпиады Вебинары для учителей
Мастер-класс на тему "Простейший алгоритм для робота-сумоиста"
Вы уже знаете о суперспособностях современного учителя?

Тратить минимум сил на подготовку и проведение уроков.

Быстро и объективно проверять знания учащихся.

Сделать изучение нового материала максимально понятным.

Избавить себя от подбора заданий и их проверки после уроков.

Наладить дисциплину на своих уроках.

Получить возможность работать творчески.
Просмотр содержимого презентации
«Урок робототехники Робот-сумоист»

Муниципальное автономное общеобразовательное учреждение –
средняя общеобразовательная школа №4
город Асино Томской области
Мастер-класс
Простейший алгоритм для робота-сумоиста
Учитель: Кривенцов Леонид Александрович,
первая квалификационная категория
Асино - 2014

Датчик расстояния
- Датчик расстояния (ультразвуковой). Работает по принципу эхолокации, по которому ориентируются в темноте летучие мыши.
- Эхолокация (эхо и лат. locatio – «положение») – способ, при помощи которого положение объекта определяется по времени задержки возвращений отраженной волны.

Цель
Составить алгоритм для робота, позволяющий вытолкнуть противника из поля боя

Задачи
1. Разработать конструкцию робота.
2. Узнать радиус окружности поля боя.
3. Подобрать максимальное расстояние атаки.
4. Подобрать мощность двигателей при вращении.
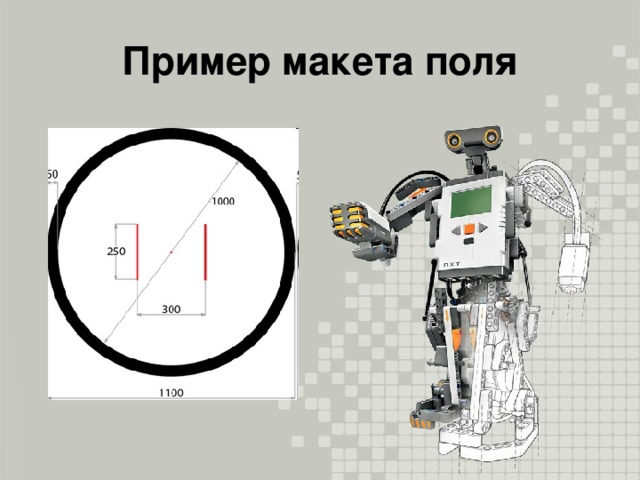
Пример макета поля

Блок-схема алгоритма
Примечание: у данного алгоритма нет конца, поэтому он выполняется бесконечно!
Дополнение
Для того, чтобы робот не покидал поле боя даже в случае победы, его необходимо оснастить датчиком освещенности или цвета. Тогда при обнаружении линии, он будет пятиться назад.
Однако, алгоритм будет более сложным.

Программирование в NXT-G
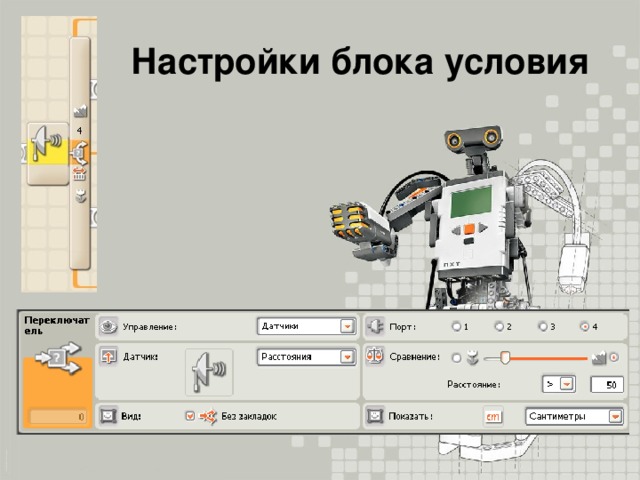
Настройки блока условия

Настройки цикла для вращения
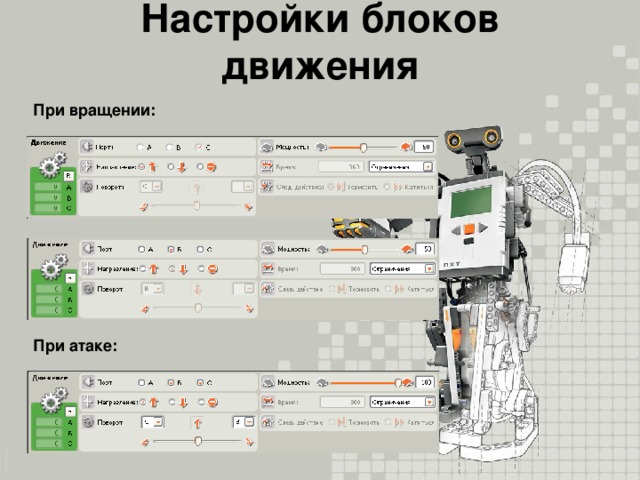
Настройки блоков движения
При вращении:
При атаке:







Полезное для учителя




Распродажа видеоуроков!

1900 руб.
2920 руб.

1770 руб.
2720 руб.

1600 руб.
2460 руб.

2040 руб.
3140 руб.
ПОЛУЧИТЕ СВИДЕТЕЛЬСТВО МГНОВЕННО

* Свидетельство о публикации выдается БЕСПЛАТНО, СРАЗУ же после добавления Вами Вашей работы на сайт
Удобный поиск материалов для учителей
Проверка свидетельства