Движение по линии:
релейный регулятор
Движение по линии:
релейный регулятор
Создайте Ваш сайт учителя Видеоуроки Олимпиады Вебинары для учителей
Движение по линии:
релейный регулятор
Движение по линии:
релейный регулятор







Движение по линии: релейный регулятор
Кривенцов Леонид Александрович
учитель информатики и робототехники
МАОУ СОШ №4 г. Асино
высшая квалификационная категория

Что выполняет датчик освещенности?
Измеряет уровень освещенности.
Например, показания сенсора может быть 10% на темной стороне и 90% процентов на светлой.
На какой высоте от поверхности поля и под каким углом лучше всего крепить датчик освещенности?
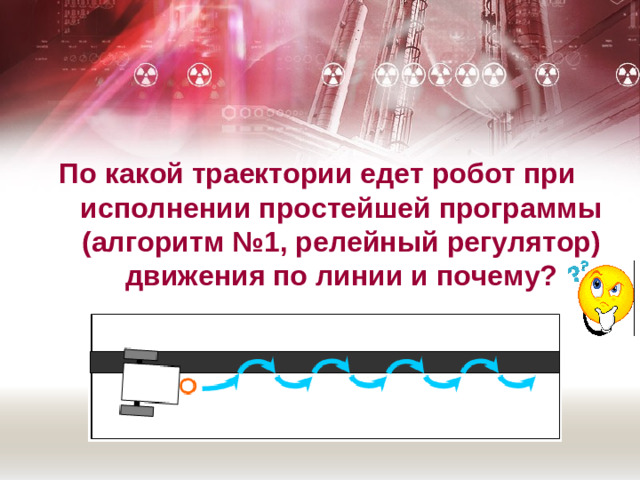
По какой траектории едет робот при исполнении простейшей программы (алгоритм №1, релейный регулятор) движения по линии и почему?

Что такое средняя освещенность и по какой формуле она рассчитывается?
Это освещенность на границе
I ср=( I св+ I тем) / 2
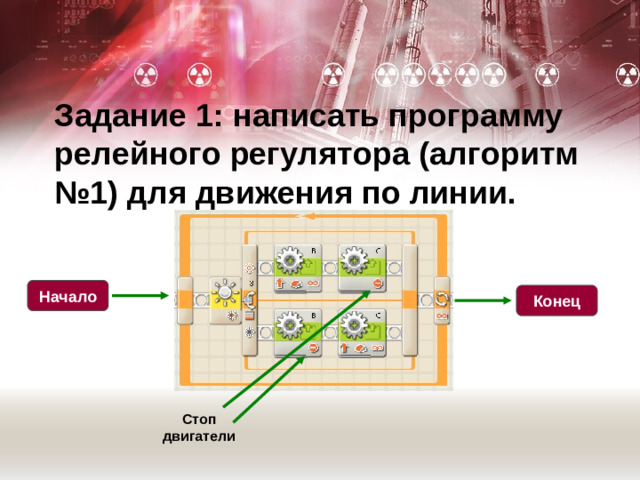
Задание 1: написать программу релейного регулятора (алгоритм №1) для движения по линии.
Начало
Конец
Стоп двигатели

Задание 2: изменить созданный алгоритм таким образом, чтобы скорость движения робота по заданной траектории увеличилась, а амплитуда линии движения уменьшилась (стала более сглаженной).
Начало
Конец
Вместо «Стоп» низкая мощность
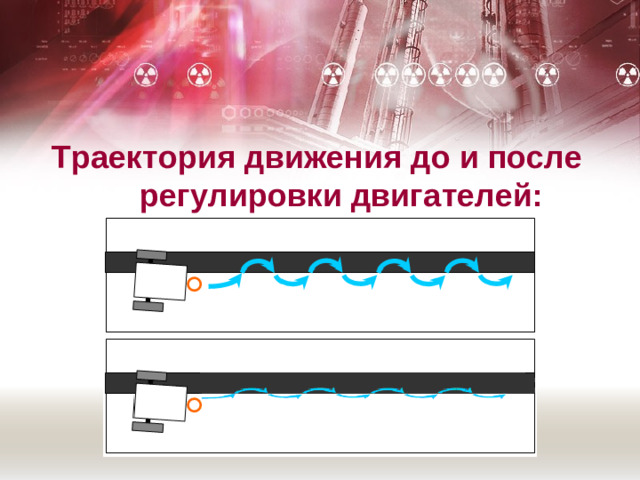
Траектория движения до и после регулировки двигателей:

Какие виды алгоритмов мы использовали в нашей программе?
Домашнее задание: Изобразить рассмотренный на уроке алгоритм в виде блок-схемы.

Список использованных текстовых и
графических источников:









* Свидетельство о публикации выдается БЕСПЛАТНО, СРАЗУ же после добавления Вами Вашей работы на сайт







