The biggest benefit of automation is that it saves labor; however, it is also used to save energy and materials and to improve quality, accuracy and precision.
Создайте Ваш сайт учителя Видеоуроки Олимпиады Вебинары для учителей
Oil and Gas Process Technology
Вы уже знаете о суперспособностях современного учителя?

Тратить минимум сил на подготовку и проведение уроков.

Быстро и объективно проверять знания учащихся.

Сделать изучение нового материала максимально понятным.

Избавить себя от подбора заданий и их проверки после уроков.

Наладить дисциплину на своих уроках.

Получить возможность работать творчески.
Просмотр содержимого документа
«Oil and Gas Process Technology»
Automation and control
Automation or automatic control, is the use of various control systems for operating equipment such as machinery, processes in factories, boilers and heat treating ovens, switching on telephone networks, steering and stabilization of ships, aircraft and other applications with minimal or reduced human intervention. Some processes have been completely automated.
The biggest benefit of automation is that it saves labor; however, it is also used to save energy and materials and to improve quality, accuracy and precision.
The term automation, inspired by the earlier word automatic (coming from automaton), was not widely used before 1947, when General Motors established an automation department. It was during this time that industry was rapidly adopting feedback controllers, which were introduced in the 1930s.
Automation has been achieved by various means including mechanical, hydraulic, pneumatic, electrical, electronic devices and computers, usually in combination. Complicated systems, such as modern factories, airplanes and ships typically use all these combined techniques.
Discrete control (on/off)
One of the simplest types of control is on-off control. An example is the thermostats used on household appliances. Electromechanical thermostats used in HVAC may only have provision for on/off control of heating or cooling systems. Electronic controllers may add multiple stages of heating and variable fan speed control.
Sequence control, in which a programmed sequence of discrete operations is performed, often based on system logic that involves system states. An elevator control system is an example of sequence control.
Continuous control
The advanced type of automation that revolutionized manufacturing, aircraft, communications and other industries, is feedback control, which is usually continuous and involves taking measurements using a sensor and making calculated adjustments to keep the measured variable within a set range. Moreover, it can be understood as the relation of two variables, one for the "x" axis and a second for the "y" axis. If the value of "y" increases, then the value on the "x" axis will also increase, and vice versa.
Open and closed loop
All the elements constituting the measurement and control of a single variable are called a control loop. Control that uses a measured signal, feeds the signal back and compares it to a set point, calculates and sends a return signal to make a correction, is called closed loop control. If the controller does not incorporate feedback to make a correction then it is open loop.
Loop control is normally accomplished with a controller. The theoretical basis of open and closed loop automation is control theory.
Sequential control and logical sequence or system state control
|
| |
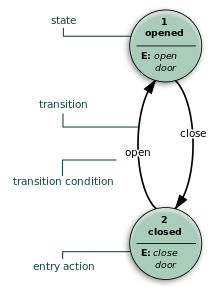
| This state diagram shows how UMLcan be used for designing a door system that can only be opened and closed | |
Sequential control may be either to a fixed sequence or to a logical one that will perform different actions depending on various system states. An example of an adjustable but otherwise fixed sequence is a timer on a lawn sprinkler.
States refer to the various conditions that can occur in a use or sequence scenario of the system. An example is an elevator, which uses logic based on the system state to perform certain actions in response to its state and operator input. For example, if the operator presses the floor n button, the system will respond depending on whether the elevator is stopped or moving, going up or down, or if the door is open or closed, and other conditions.
An early development of sequential control was relay logic, by which electrical relays engage electrical contacts which either start or interrupt power to a device. Relays were first used in telegraph networks before being developed for controlling other devices, such as when starting and stopping industrial-sized electric motors or opening and closing solenoid valves. Using relays for control purposes allowed event-driven control, where actions could be triggered out of sequence, in response to external events. These were more flexible in their response than the rigid single-sequence cam timers. More complicated examples involved maintaining safe sequences for devices such as swing bridge controls, where a lock bolt needed to be disengaged before the bridge could be moved, and the lock bolt could not be released until the safety gates had already been closed.
The total number of relays, cam timers and drum sequencers can number into the hundreds or even thousands in some factories. Early programming techniques and languages were needed to make such systems manageable, one of the first being ladder logic, where diagrams of the interconnected relays resembled the rungs of a ladder. Special computers called programmable logic controllers were later designed to replace these collections of hardware with a single, more easily re-programmed unit.
In a typical hard wired motor start and stop circuit (called a control circuit) a motor is started by pushing a "Start" or "Run" button that activates a pair of electrical relays. The "lock-in" relay locks in contacts that keep the control circuit energized when the push button is released. (The start button is a normally open contact and the stop button is normally closed contact.) Another relay energizes a switch that powers the device that throws the motor starter switch (three sets of contacts for three phase industrial power) in the main power circuit. Large motors use high voltage and experience high in-rush current, making speed important in making and breaking contact. This can be dangerous for personnel and property with manual switches. The "lock in" contacts in the start circuit and the main power contacts for the motor are held engaged by their respective electromagnets until a "stop" or "off" button is pressed, which de-energizes the lock in relay.[5]
Commonly interlocks are added to a control circuit. Suppose that the motor in the example is powering machinery that has a critical need for lubrication. In this case an interlock could be added to insure that the oil pump is running before the motor starts. Timers, limit switches and electric eyes are other common elements in control circuits.
Solenoid valves are widely used on compressed air or hydraulic fluid for powering actuators on mechanical components. While motors are used to supply continuous rotary motion, actuators are typically a better choice for intermittently creating a limited range of movement for a mechanical component, such as moving various mechanical arms, opening or closing valves, raising heavy press rolls, applying pressure to presses.
Computer control
Computers can perform both sequential control and feedback control, and typically a single computer will do both in an industrial application. Programmable logic controllers(PLCs) are a type of special purpose microprocessor that replaced many hardware components such as timers and drum sequencers used in relay logic type systems. General purpose process control computers have increasingly replaced stand alone controllers, with a single computer able to perform the operations of hundreds of controllers. Process control computers can process data from a network of PLCs, instruments and controllers in order to implement typical (such as PID) control of many individual variables or, in some cases, to implement complex control algorithms using multiple inputs and mathematical manipulations. They can also analyze data and create real time graphical displays for operators and run reports for operators, engineers and management.
Control of an automated teller machine (ATM) is an example of an interactive process in which a computer will perform a logic derived response to a user selection based on information retrieved from a networked database. The ATM process has similarities with other online transaction processes. The different logical responses are called scenarios. Such processes are typically designed with the aid of use cases and flowcharts, which guide the writing of the software code.
History
The earliest feedback control mechanism was used to tent the sails of windmills. It was patented by Edmund Lee in 1745.
The centrifugal governor, which dates to the last quarter of the 18th century, was used to adjust the gap between millstones. The centrifugal governor was also used in the automatic flour mill developed by Oliver Evans in 1785, making it the first completely automated industrial process. The governor was adopted by James Watt for use on a steam engine in 1788 after Watt’s partner Boulton saw one at a flour mill Boulton & Watt were building.
The governor could not actually hold a set speed; the engine would assume a new constant speed in response to load changes. The governor was able to handle smaller variations such as those caused by fluctuating heat load to the boiler. Also, there was a tendency for oscillation whenever there was a speed change. As a consequence, engines equipped with this governor were not suitable for operations requiring constant speed, such as cotton spinning.
Several improvements to the governor, plus improvements to valve cut-off timing on the steam engine, made the engine suitable for most industrial uses before the end of the 19th century. Advances in the steam engine stayed well ahead of science, both thermodynamics and control theory.
The governor received relatively little scientific attention until James Clerk Maxwell published a paper that established the beginning of a theoretical basis for understanding control theory. Development of the electronic amplifier during the 1920s, which was important for long distance telephony, required a higher signal to noise ratio, which was solved by negative feedback noise cancellation. This and other telephony applications contributed to control theory. Military applications during the Second World War that contributed to and benefited from control theory were fire-control systems and aircraft controls. The word "automation" itself was coined in the 1940s by General Electric. The so-called classical theoretical treatment of control theory dates to the 1940s and 1950s.
Relay logic was introduced with factory electrification, which underwent rapid adaption from 1900 though the 1920s. Central electric power stations were also undergoing rapid growth and operation of new high pressure boilers, steam turbines and electrical substations created a large demand for instruments and controls.
Central control rooms became common in the 1920s, but as late as the early 1930s, most process control was on-off. Operators typically monitored charts drawn by recorders that plotted data from instruments. To make corrections, operators manually opened or closed valves or turned switches on or off. Control rooms also used color coded lights to send signals to workers in the plant to manually make certain changes.
Controllers, which were able to make calculated changes in response to deviations from a set point rather than on-off control, began being introduced the 1930s. Controllers allowed manufacturing to continue showing productivity gains to offset the declining influence of factory electrification.[10]
Factory productivity was greatly increased by electrification in the 1920s. Manufacturing productivity growth fell from 5.2%/yr 1919-29 to 2.76%/yr 1929-41. Field notes that spending on non-medical instruments increased significantly from 1929–33 and remained strong thereafter.
In 1959 Texaco’s Port Arthur refinery became the first chemical plant to use digital control. Conversion of factories to digital control began to spread rapidly in the 1970s as the price of computer hardware fell.








Полезное для учителя




Распродажа видеоуроков!

1750 руб.
2690 руб.

1750 руб.
2690 руб.

1730 руб.
2660 руб.

1750 руб.
2690 руб.
ПОЛУЧИТЕ СВИДЕТЕЛЬСТВО МГНОВЕННО

* Свидетельство о публикации выдается БЕСПЛАТНО, СРАЗУ же после добавления Вами Вашей работы на сайт
Удобный поиск материалов для учителей
Проверка свидетельства