Создайте Ваш сайт учителя Курсы ПК и ППК Видеоуроки Олимпиады Вебинары для учителей
Нескучные уроки физики. Презентация по теме "Применение Лего на уроках физики"






Просмотр содержимого документа
«Нескучные уроки физики. Презентация по теме "Применение Лего на уроках физики"»
Применение Лего на уроках физики
Выполнила: учитель физики
МАОУ СОШ №36
Марочкина С.В.
Направления использования роботов в преподавании физики
- Робот, как объект изучения . Изучение физических принципов работы датчиков, двигателей и других систем конструктора.
- Робот как средство измерения в
традиционном эксперименте.
Датчики базового конструктора и дополнительные виды датчиков (Vernier, HiTechnic и др.) используются как измерительная система в физическом эксперименте с обработкой и фиксацией его результатов в различных видах.
- Робот как средство постановки физического
эксперимента (роботизированный эксперимент). Комплексное использование двигателей, систем оповещения, датчиков, робототехнического конструктора в демонстрационном и лабораторном эксперименте.
- Робот как средство учебного моделирования и конструирования. Применение образовательной робототехники в проектно-исследовательской и конструкторской работе учащихся:
1. использование имеющихся роботов с другими системами,
2. создание нового робота,
3. модернизация робота (разработка и проектирование новых датчиков и других систем робота, расширяющих возможности его использования, в том числе в новых условиях).
Достоинства использования элементов робототехники на уроках
- Обработка результатов измерения физических величин
может быть запрограммирована проведена в автоматическом
режиме при выполнении программы.
2. Исключаются случайные ошибки измерения, связанные с
использованием органов чувств человека при измерении: со
скоростью реакции человека, глазомером, восприятием
событий на слух и т.д.
3. Непрерывный мониторинг значения физической величины в
ходе эксперимента в течение указанного промежутка времени и с
регулируемой частотой снятия показаний датчика от единичного
измерения за всё время эксперимента до нескольких десятков раз
в секунду.
4. Данные эксперимента выводятся на экран на протяжении всего
хода эксперимента в виде численных значений, числовой шкалы
с указателем, таблиц значений и графиков функций.
5. График, полученный в результате эксперимента, а также
инструменты для его исследования дают дополнительны
возможности для анализа закономерностей физического
процесса:
- вывод численных данных для любой точки графика;
- вывод значений различных интервалов изменения величины за заданный промежуток времени;
- определение среднего значения величины за некоторый промежуток времени;
- отображение на координатной плоскости нескольких графиков,
полученных в ходе нескольких аналогичных экспериментов.
Недостатки применения
1.Экспериментальная установка с применением робота требует
предварительной сборки и программирования, что
сопровождается затратам времени.
Для минимизации временных затрат рекомендуется:
- предварительное создание пошаговых инструкций по сборке
- установки;
- создание банка программ, подготовленных для использования на различных установках;
- замена некоторых узлов конструкции установки неразборными
- аналогами;
- предварительная сборка установки школьниками до урока (в рамках выполнения индивидуального или группового творческого задания).
2. наличие инструментальной погрешности датчиковых систем
и необходимость их учёта.
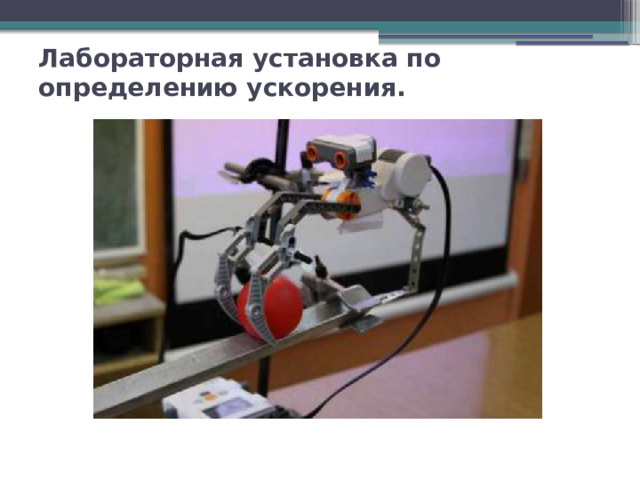
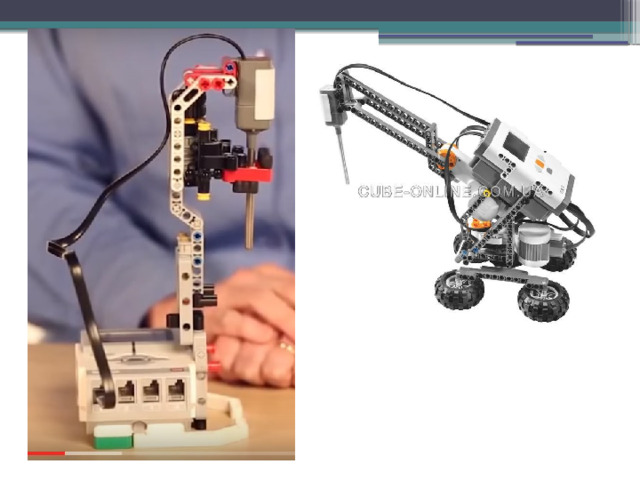
Лабораторная установка по определению ускорения.
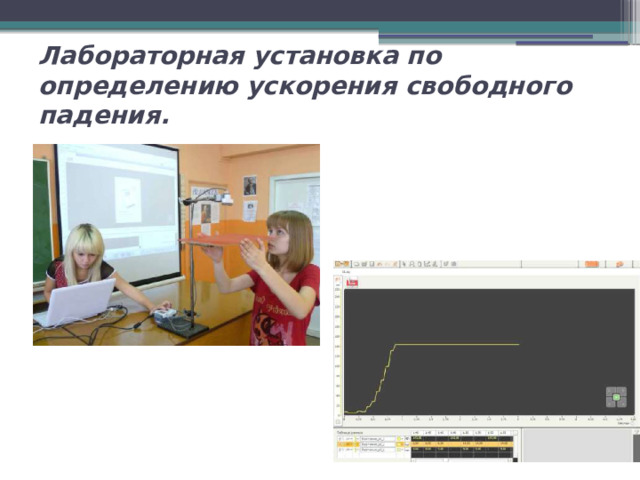
Лабораторная установка по определению ускорения свободного падения.

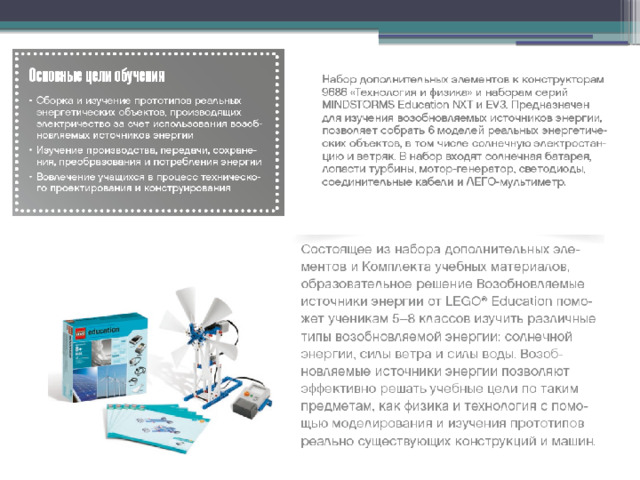
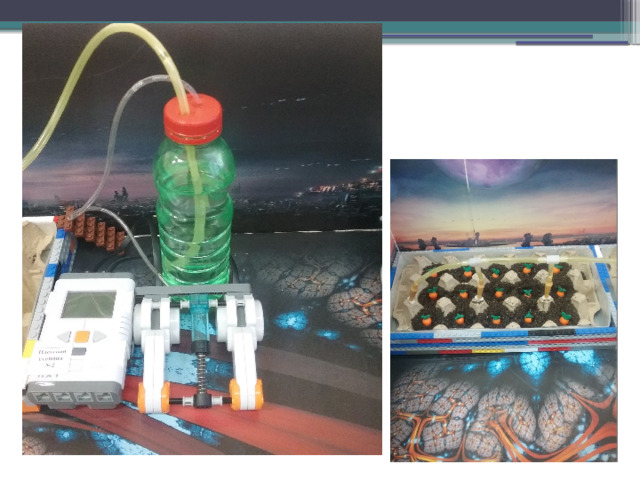
Возобновляемые источники
энергии
Пневматика
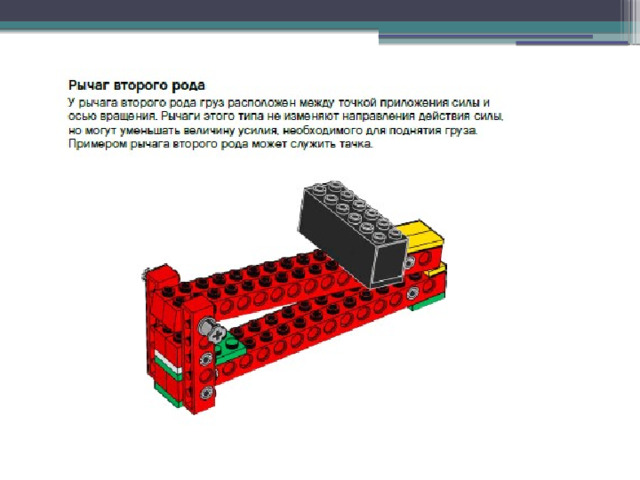
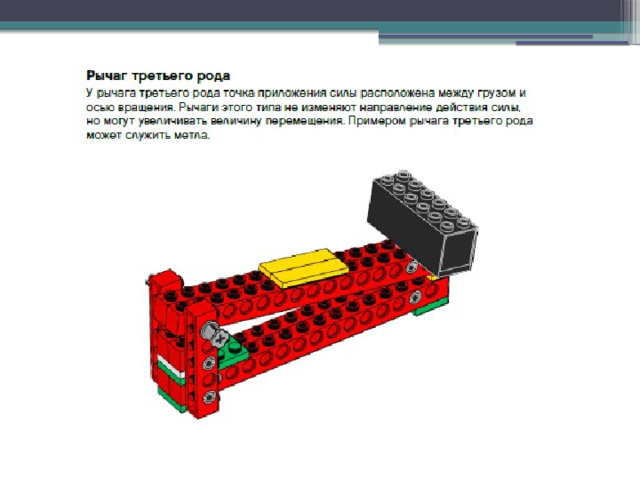
Простые механизмы
EV3
Физика и технология
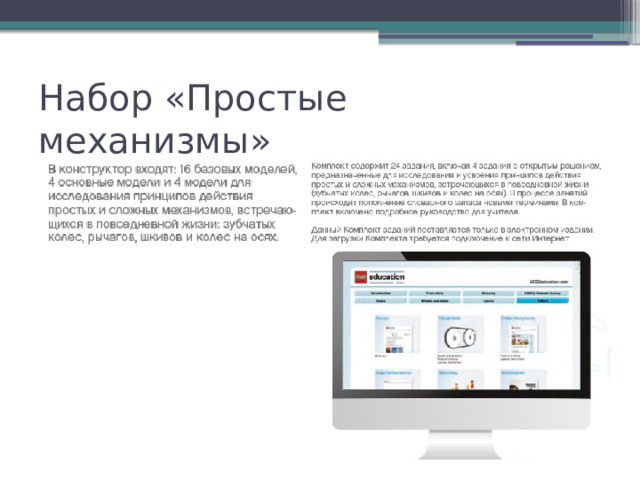
Набор «Простые механизмы»










Использование конструктора LEGO «Технология и физика»



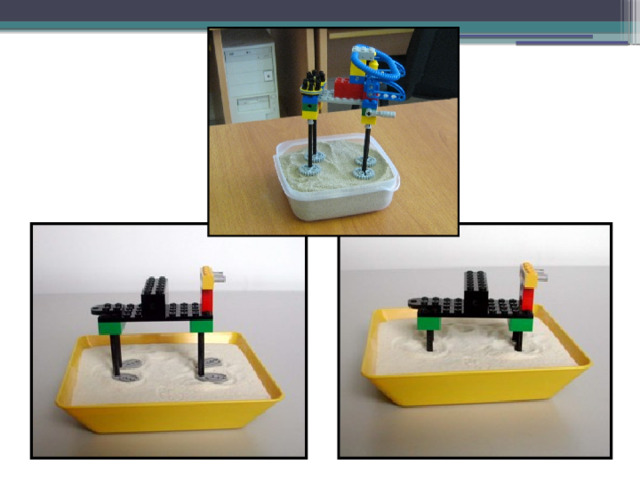
Тема: Измерение массы тела на весах. Конструируем весы
Из опыта работы Лужновой Г.В. учителя физики МАОУ СОШ №14 .г. Челябинска
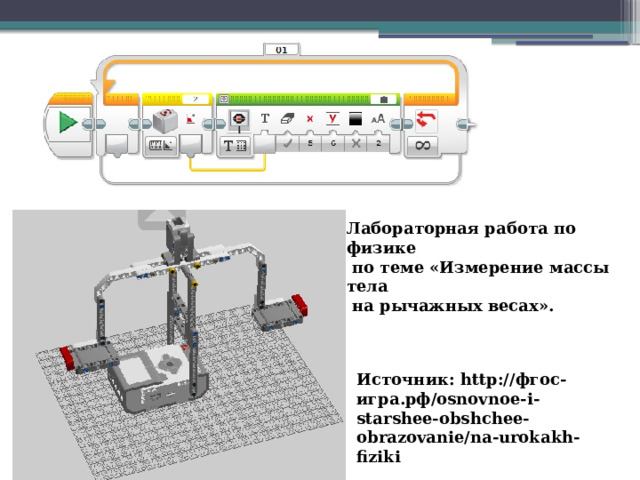
Лабораторная работа по физике
по теме «Измерение массы тела
на рычажных весах».
Источник: http://фгос-игра.рф/osnovnoe-i-starshee-obshchee-obrazovanie/na-urokakh-fiziki

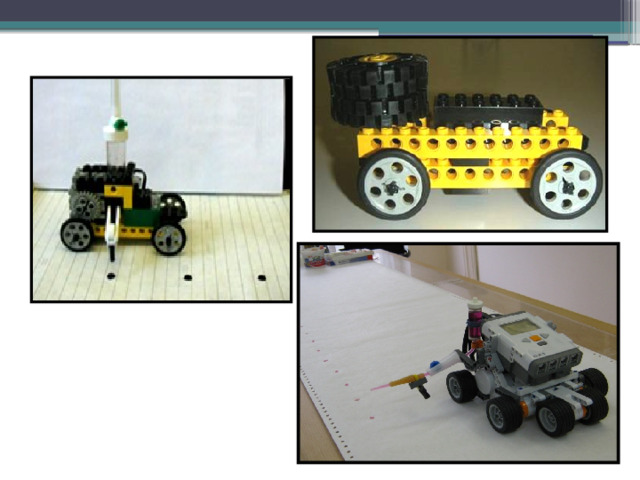
Тема: Давление

Равномерное и неравномерное движение

Тема:Сила трения
Измерение силы трения, изучение зависимости силы трения скольжения от веса тела и рода трущихся поверхностей
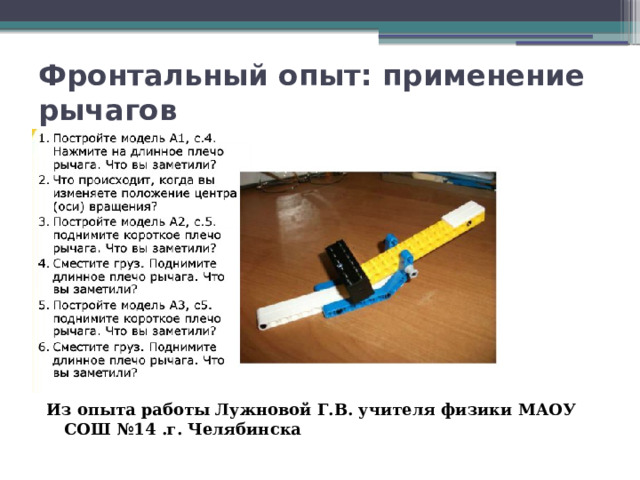
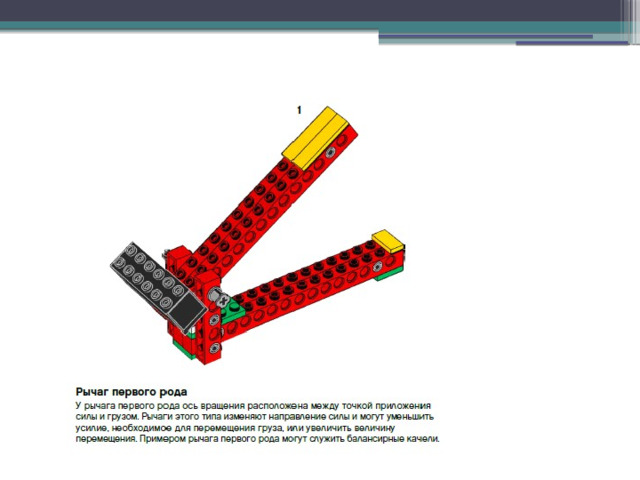
Фронтальный опыт: применение рычагов
Из опыта работы Лужновой Г.В. учителя физики МАОУ СОШ №14 .г. Челябинска
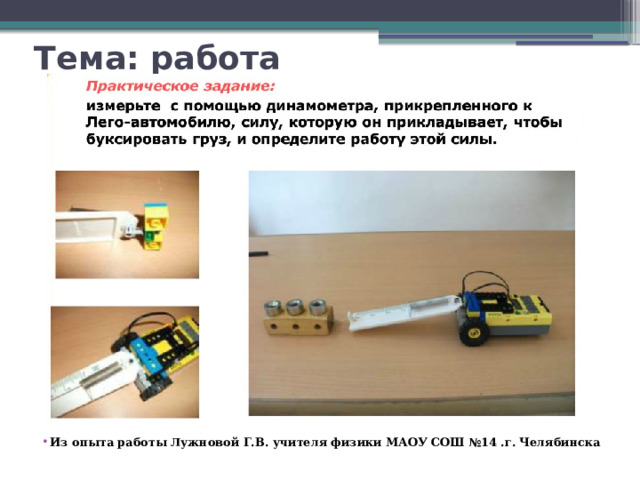
Тема: работа
- Из опыта работы Лужновой Г.В. учителя физики МАОУ СОШ №14 .г. Челябинска
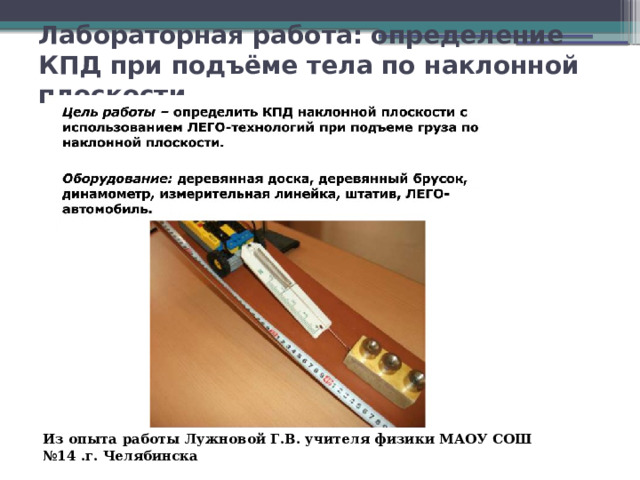
Лабораторная работа: определение КПД при подъёме тела по наклонной плоскости
Из опыта работы Лужновой Г.В. учителя физики МАОУ СОШ
№ 14 .г. Челябинска
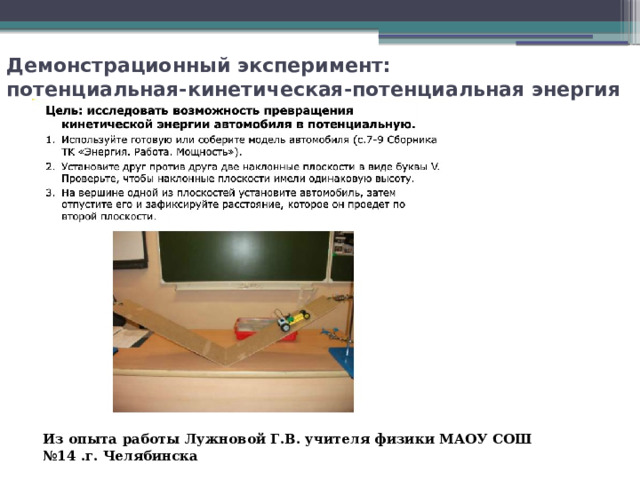
Демонстрационный эксперимент: потенциальная-кинетическая-потенциальная энергия
Из опыта работы Лужновой Г.В. учителя физики МАОУ СОШ
№ 14 .г. Челябинска
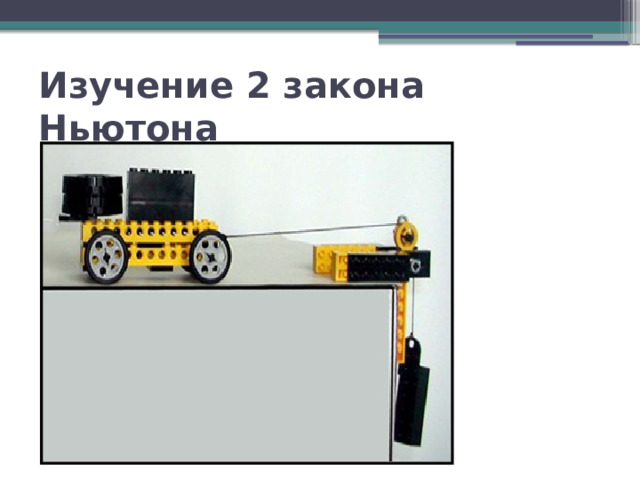
Изучение 2 закона Ньютона
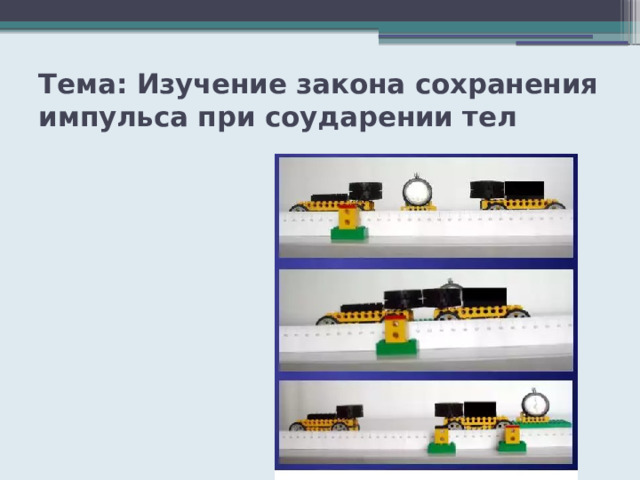
Тема: Изучение закона сохранения импульса при соударении тел



Данное пособие содержит
начальный блок несложных
робототехнических
лабораторных работ
пропедевтического курса
физики, которые можно
проводить на уроках в 5-х
классах.
Лабораторная работа №1 Определение времени движения бруска по наклонной плоскости
Цель работы : наблюдая за движением бруска по наклонной плоскости, с помощью встроенного в PC таймера определить полное время движения бруска по наклонной плоскости для разной высоты крепления наклонной плоскости
Приборы и материалы : лабораторная скамейка, штатив, брусок, Базовый набор Lego Mindstorms Education EV3, два датчика касания, микрокомпьютер EV3, PC
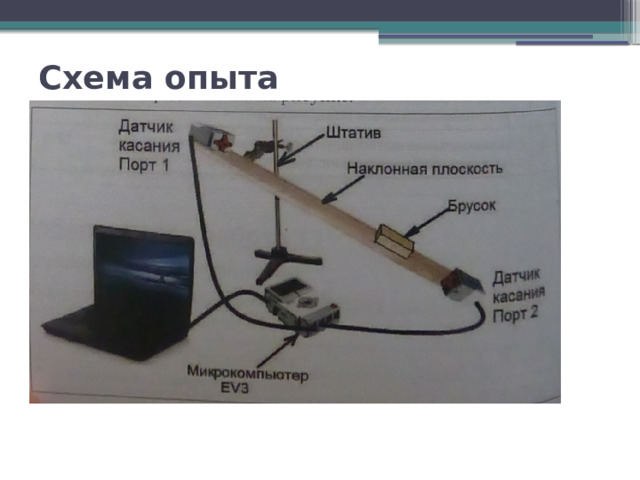
Схема опыта
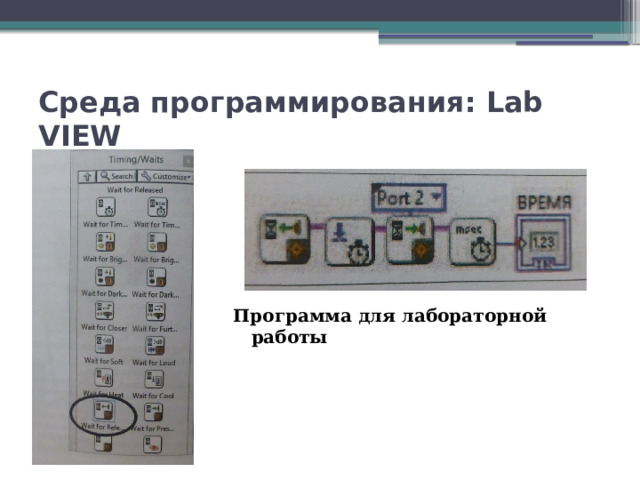
Среда программирования: Lab VIEW
Программа для лабораторной работы
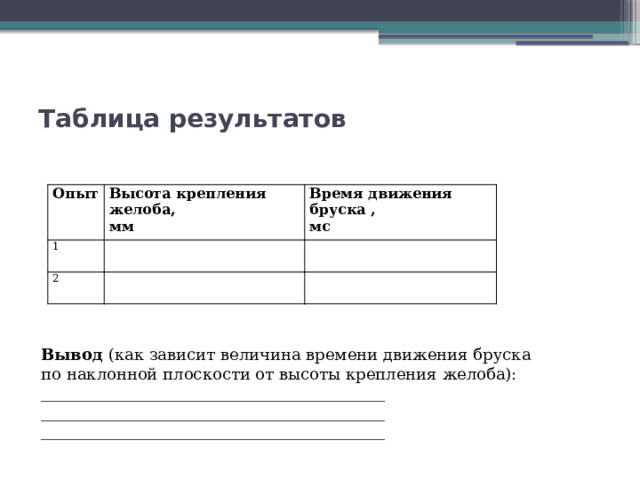
Таблица результатов
Опыт
Высота крепления желоба,
1
мм
Время движения бруска ,
2
мс
Вывод (как зависит величина времени движения бруска
по наклонной плоскости от высоты крепления желоба):
___________________________________________
___________________________________________
___________________________________________











Полезное для учителя










* Свидетельство о публикации выдается БЕСПЛАТНО, СРАЗУ же после добавления Вами Вашей работы на сайт